Aby uzyskać dostęp do większej liczby lekcji, powróć na stronę startową kursu.
Przystosowanie się do nowego środowiska programowania wymaga czasu, dlatego aby oszczędzić czas związany z wdrożeniem Unitronics wykorzystuje w oprogramowaniu UniLogic bloki funkcyjne do sterowania serwonapędem zgodne z standardem PLCopen (norma IEC 61131-3). Poniżej opisano podstawowe bloki służące do sterowania ruchem.
Spis treści
Bloki funkcyjne ogólne
1. MC Power
Ten blok funkcyjny kontroluje przepływ mocy do osi (WŁ lub WYŁ).
Aktywuje się poprzez zbocze narastające bitu włączenia (Enable bit).
- Używaj jednego bloku MC Power na oś.
- Gdy serwosterownik jest rozłączony w momencie rozpoczęcia MC Power, należy wywołać zbocze narastające bitu włączenia MC Power.
- MC Power musi być stale wywoływane nawet, gdy wejście włączenia jest WYŁ.
- Jeśli blok MC Power jest wywoływany – bit włączenia WŁ – oś wyłączona, stan osi zmienia się na Standstill (Postój), pod warunkiem że serwosterownik nie wykrył błędu. Jeśli wykryto błąd, użyj bloku MC Reset by zmienić stan osi do Postoju
- Jeśli bit włączenia w MC Power zostanie wyłączony podczas ruchu, oś zareaguje odpowiednio do wybranych opcji wyłączenia (Axis>Dynamics>Stop options>Disable options). Załączy się bit błędu (Error bit) w używanym bloku ruchu, podczas gdy ID błędu=300 (PLCOpen: niedozwolone przejście).
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być zasilana |
|
B |
Enable |
Kiedy WŁ, moc zostaje dostarczona do serwosterownika, który jest powiązany z osią |
|
C |
Status |
Efektywny stan fazy mocy |
|
D |
A Valid set of outputs is available |
Jeśli Prawda, zbiór wyjść dostępny dla bloku |
|
E |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
F |
Error ID |
Wartość wskazuje kod błędu |
2. MC Home
Ten blok funkcyjny instruuje oś do przeprowadzenia sekwencji bazowania. Ustawiony w Axis>Homing.
Wejście Pozycja (Position) służy do ustawienia absolutnej pozycji w momencie wykrycia sygnału referencyjnego. Po zakończeniu blok funkcyjny przechodzi w stan Standstill (Postój) jeśli przed rozpoczęciem również był w tym stanie.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być zasilana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Position |
Ustawia pozycję bazową (Pozycja absolutna, gdy wykryto sygnał referencyjny) |
|
D |
Done |
Bit: WŁ, gdy oś w pozycji bazowej |
|
E |
Busy |
Blok funkcyjny aktualnie steruje osią |
|
F |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
G |
Command Aborted |
Bit: WŁ, gdy anulowano blok funkcyjny inną instrukcją |
|
H |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
I |
Error ID |
Wartość wskazuje kod błędu |
3. MC Stop
Ten blok funkcyjny hamuje oś zgodnie z zdefiniowanym w konfiguracji osi hamowaniu awaryjnym. Hamuje wybraną oś i zmienia stan osi w Zatrzymywanie. Anuluje wykonywanie wszelkich pozostałych bloków funkcyjnych. Podczas gdy oś znajduje się w stanie Zatrzymywanie żadne bloki funkcyjne nie mogą wykonywać ruchu na tej osi.
Po osiągnięciu prędkości zerowej, wyjście Ukończono będzie WŁ.
Oś pozostaje w stanie Zatrzymywanie tak długo jak Wykonaj będzie 1 lub prędkość nie osiągnie 0. Gdy Ukończono będzie WŁ i Wykonaj WYŁ, oś przejdzie w stan Standstill (Postój).
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Jerk |
Wartość zrywu. Ważne tylko gdy wybrano profil ruchu Krzywa-S |
|
D |
Done |
Bit: WŁ, gdy osiągnięto prędkość zerową |
|
E |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
F |
Command Aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
G |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
H |
Error ID |
Wartość wskazuje kod błędu |
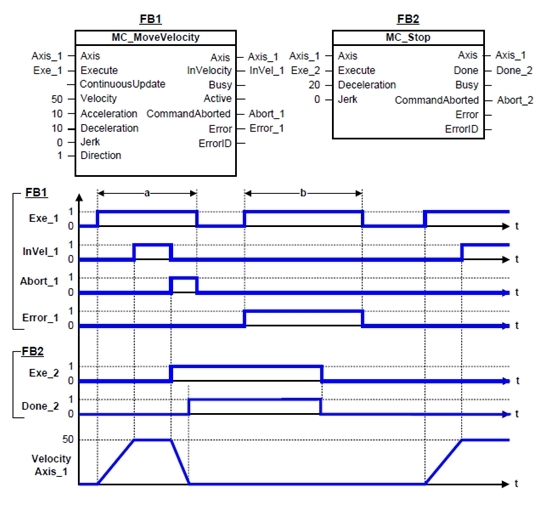
Poniższy rysunek pokazuje zachowanie MC Stop w kombinacji z MC MoveVelocity:
- Obracająca się oś jest wyhamowywana blokiem MC Stop.
- Oś odrzuca instrukcje ruchu tak długo jak parametr Wykonaj w MC Stop pozostaje WŁ.
Blok MC MoveVelocity wyświetla błąd sugerujący działającą instrukcję Stop.
4. MC Halt
Ten blok funkcyjny zatrzymuje oś zgodnie z tempem zwalniania ustawionym w parametrze C, po zatrzymaniu zmienia stan osi na Standstill (Postój).
Oś jest w stanie Ruchu dyskretnego dopóki nie osiągnie prędkości zerowej. Po włączeniu wyjścia Ukończono, przechodzi w stan Standstill (Postój).
- W parametrach osi Axis>Dynamics>Stop options> Halt option, jeśli wybrano Zwolnij podczas zatrzymania awaryjnego, tempo zwalniania będzie inne niż tempo ustawione w bloku MC Halt.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Deceleration |
Wartość zwalniania |
|
D |
Jerk |
Wartość zrywu [u/s3] (zawsze dodatnia). Ważne tylko gdy wybrano profil ruchu Krzywa-S |
|
E |
Done |
Bit: WŁ, gdy zakończono zatrzymywanie osi |
|
F |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
G |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
H |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
I |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
J |
Error ID |
Wartość wskazuje kod błędu |
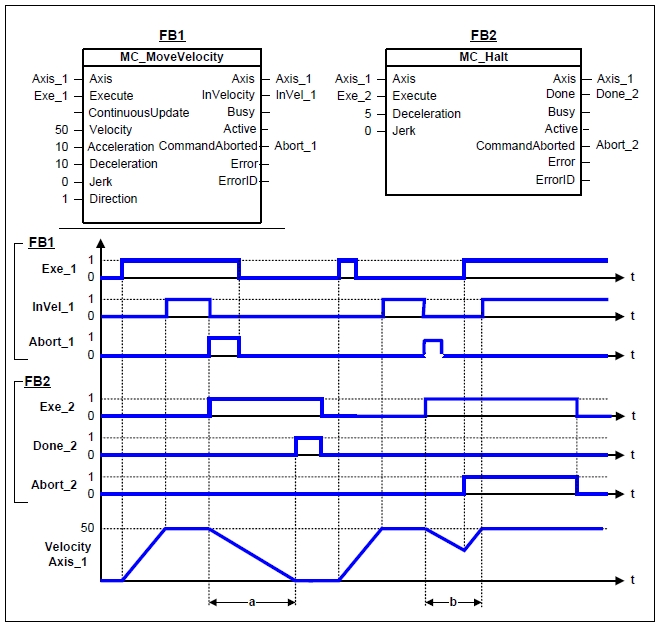
Poniższy rysunek pokazuje zachowanie MC Halt w kombinacji z MC Move Velocity:
- Obracająca się oś jest wyhamowywana blokiem MC Halt.
- Inna instrukcja nadpisuje instrukcję MC Halt. MC Halt pozwala na to w przeciwieństwie do MC Stop.
Oś może ponownie przyśpieszać bez osiągnięcia Postoju.
5. MC Move Absolute
Ten blok funkcyjny wykonuje ruch do konkretnej pozycji absolutnej.
Akcja zostaje ukończona z prędkością zerową jeśli nie zlecono innych czynności ruchu.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Continuous Update |
Jeśli WŁ, parametry wejściowe są weryfikowane w każdym cyklu |
|
D |
Position |
Wartość przemieszczenia (w ustawionych jednostkach [u]) (do przodu/tyłu) |
|
E |
Velocity |
Maksymalna wartość prędkości (nie koniecznie osiągnięta) [u/s] |
|
F |
Acceleration |
Wartość przyśpieszenia (zawsze dodatnia) (zwiększenie energii silnika) [u/s2] |
|
G |
Deceleration |
Wartość zwalniania (zawsze dodatnia) (zmniejszenie energii silnika) [u/s2]. Jeśli wartość 0, zostanie użyta wartość przyśpieszenia.
EtherCAT: Zwalnianie nie jest używana w EtherCAT; zamiast tego zostanie wykorzystana funkcja wartości przyśpieszenia |
|
H |
Jerk |
Wartość zrywu [u/s3] (zawsze dodatnia). Ważne tylko gdy wybrano profil ruchu Krzywa-S |
|
I |
Done |
Bit: WŁ, gdy zakończono zatrzymywanie osi |
|
J |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
K |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
L |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
M |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
N |
Error ID |
Wartość wskazuje kod błędu |
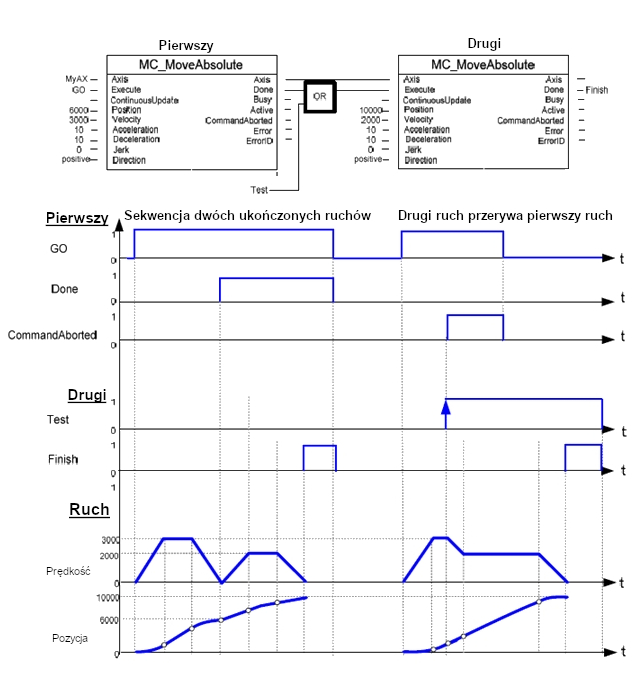
Poniższy rysunek pokazuje dwa przykłady kombinacji dwóch bloków Move Absolute:
- Lewa część diagramu czasu pokazuje przypadek, gdy drugi blok funkcyjny zostaje wywołany po pierwszym bloku. Jeśli pierwszy osiągnął pozycję 6000 (i prędkość jest 0) wtedy wyjście ‘Done’ wywołuje drugi bloku, aby zmienić pozycję na 10000.
- Prawa część diagramu czasu pokazuje przypadek, gdy drugi blok rozpoczyna działanie gdy pierwszy blok dalej działa. W tym przypadku pierwszy blok zostaje przerwany przez sygnał testowy podczas stałej prędkości pierwszego bloku. Drugi blok porusza się bezpośrednio do pozycji 10000 pomimo, że nie osiągnięto pozycję 6000.
6. MC Move Relative
Ten blok funkcyjny wykonuje ruch do konkretnej pozycji w odniesieniu do aktualnej pozycji w czasie realizacji.
Akcja zostaje ukończona z prędkością zerową.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Continuous Update |
Jeśli WŁ, parametry wejściowe są weryfikowane w każdym cyklu |
|
D |
Position |
Wartość przemieszczenia (w ustawionych jednostkach [u]) (do przodu/tyłu) |
|
E |
Velocity |
Maksymalna wartość prędkości (nie koniecznie osiągnięta) [u/s] |
|
F |
Acceleration |
Wartość przyśpieszenia (zawsze dodatnia) (zwiększenie energii silnika) [u/s2] |
|
G |
Deceleration |
Wartość zwalniania (zawsze dodatnia) (zmniejszenie energii silnika) [u/s2]. Jeśli wartość 0, zostanie użyta wartość przyśpieszenia.
EtherCAT: Zwalnianie nie jest używana w EtherCAT; zamiast tego zostanie wykorzystana funkcja wartości przyśpieszenia |
|
H |
Jerk |
Wartość zrywu [u/s3] (zawsze dodatnia). Ważne tylko gdy wybrano profil ruchu Krzywa-S |
|
I |
Done |
Bit: WŁ, gdy zakończono zatrzymywanie osi |
|
J |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
K |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
L |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
M |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
N |
Error ID |
Wartość wskazuje kod błędu |
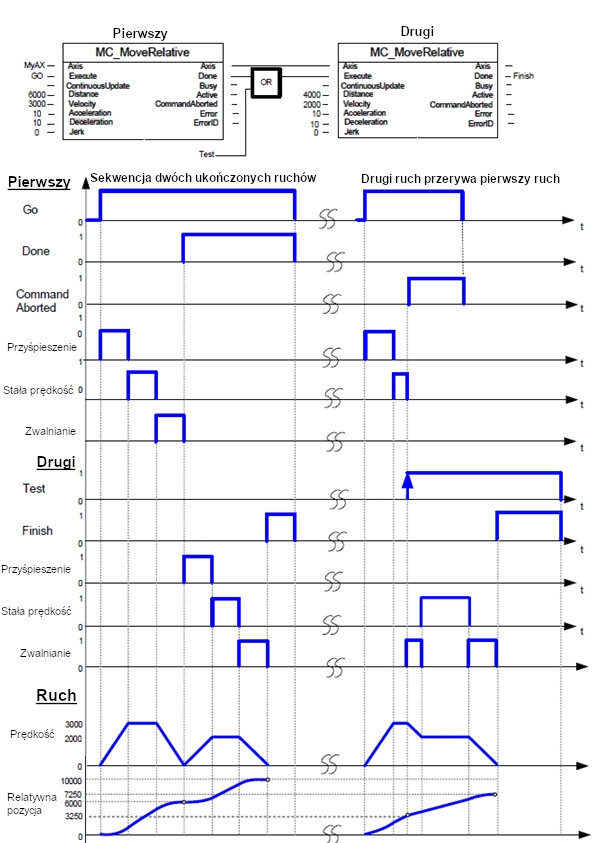
Poniższy rysunek pokazuje dwa przykłady kombinacji dwóch bloków Move Absolute:
- Lewa część diagramu czasu pokazuje przypadek, gdy drugi blok funkcyjny zostaje wywołany po pierwszym bloku. Jeśli pierwszy osiągnął pozycję 6000 (i prędkość jest 0) wtedy wyjście ‘Done’ wywołuje drugi bloku, aby zmienić pozycję o 4000, następuje przejście do pozycji 10000.
- Prawa część diagramu czasu pokazuje przypadek, gdy drugi blok rozpoczyna działanie gdy pierwszy blok dalej działa. W tym przypadku pierwszy blok zostaje przerwany przez sygnał testowy podczas stałej prędkości pierwszego bloku. Drugi blok dodaje do aktualnej pozycji 3250 odległość 4000 i porusza osią do pozycji 7250.
7. MC Move Additive
Ten blok funkcyjny wykonuje ruch o konkretną pozycję odniesienia w stosunku do ostatniej komendy pozycji w stanie osi „Ruch dyskretny (Discrete Motion)”. Ostatnia komenda pozycji może być rezultatem zatrzymania wcześniejszego bloku MC Move Additive.
Jeśli aktywowano blok w stanie osi „Ciągły ruch (Continuous Motion)”, pozycja zostaje dodana jako ustawiona pozycja w czasie wykonywania.
W trybie Move Additive, Continuous Update działa na prędkość, przyśpieszenie, zwalnianie, ale nie pozycję.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Continuous Update |
Jeśli WŁ, parametry wejściowe są weryfikowane w każdym cyklu |
|
D |
Position |
Wartość przemieszczenia (w ustawionych jednostkach [u]) (do przodu/tyłu) |
|
E |
Velocity |
Maksymalna wartość prędkości (nie koniecznie osiągnięta) [u/s] |
|
F |
Acceleration |
Wartość przyśpieszenia (zawsze dodatnia) (zwiększenie energii silnika) [u/s2] |
|
G |
Deceleration |
Wartość zwalniania (zawsze dodatnia) (zmniejszenie energii silnika) [u/s2]. Jeśli wartość 0, zostanie użyta wartość przyśpieszenia.
EtherCAT: Zwalnianie nie jest używana w EtherCAT; zamiast tego zostanie wykorzystana funkcja wartości przyśpieszenia |
|
H |
Jerk |
Wartość zrywu [u/s3] (zawsze dodatnia). Ważne tylko gdy wybrano profil ruchu Krzywa-S |
|
I |
Done |
Bit: WŁ, gdy zakończono zatrzymywanie osi |
|
J |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
K |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
L |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
M |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
N |
Error ID |
Wartość wskazuje kod błędu |
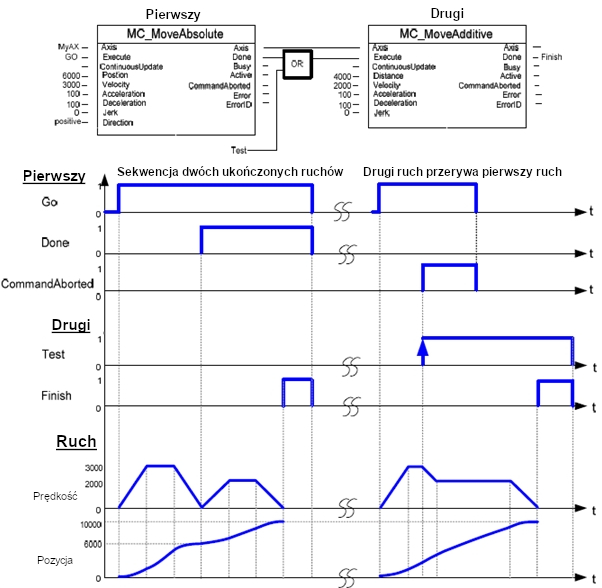
- Lewa część diagramu czasu pokazuje przypadek, gdy drugi blok funkcyjny zostaje wywołany po pierwszym bloku. Jeśli pierwszy osiągnął pozycję 6000 (i prędkość jest 0) wtedy wyjście ‘Done’ wywołuje drugi bloku, aby zmienić pozycję na 10000.
- Prawa część diagramu czasu pokazuje przypadek, gdy drugi blok rozpoczyna działanie gdy pierwszy blok dalej działa. W tym przypadku pierwszy blok zostaje przerwany przez sygnał testowy podczas stałej prędkości pierwszego bloku. Drugi blok poruszy się o 4000 w stosunku do wcześniejszej pozycji 6000, w rezultacie osiągając pozycję 10000.
8. MC Move Velocity
Ten blok funkcyjny wykonuje niekończący się ruch o zadanej prędkości.
- Ujemna prędkość * ujemny kierunek = dodatnia prędkość.
- Do zatrzymania ruchu, blok funkcyjny musi być przerwany poprzez wywołanie innego bloku.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Continuous Update |
Jeśli WŁ, parametry wejściowe są weryfikowane w każdym cyklu |
|
D |
Velocity |
Maksymalna wartość prędkości (nie koniecznie osiągnięta) [u/s] |
|
E |
Acceleration |
Wartość przyśpieszenia (zawsze dodatnia) (zwiększenie energii silnika) [u/s2] |
|
F |
Deceleration |
Wartość zwalniania (zawsze dodatnia) (zmniejszenie energii silnika) [u/s2]. Jeśli wartość 0, zostanie użyta wartość przyśpieszenia.
EtherCAT: Zwalnianie nie jest używana w EtherCAT; zamiast tego zostanie wykorzystana funkcja wartości przyśpieszenia |
|
G |
Jerk |
Wartość zrywu [u/s3] (zawsze dodatnia). Ważne tylko gdy wybrano profil ruchu Krzywa-S |
|
H |
Direction |
Wartości numeryczne: 0 – kierunek dodatni, (1 – najkrótsza droga, nie dotyczy), 2 – kierunek ujemny, 3 – aktualny kierunek |
|
I |
In Velocity |
Bit: WŁ, gdy osiągnięto żądaną prędkość |
|
J |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
K |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
L |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
M |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
N |
Error ID |
Wartość wskazuje kod błędu |
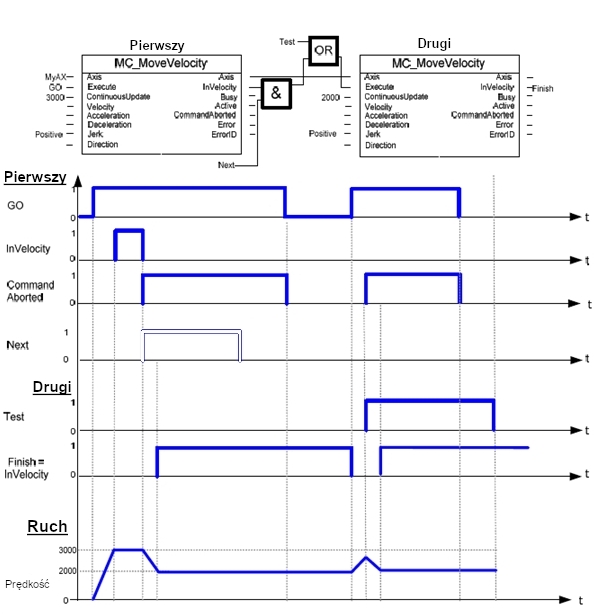
Poniższy rysunek pokazuje dwa przykłady kombinacji dwóch bloków Move Velocity:
- Lewa część diagramu czasu pokazuje przypadek, gdy drugi blok funkcyjny zostaje wywołany po pierwszym bloku. Jeśli pierwszy osiągnie wymaganą prędkość 3000, załączy się wyjście First.InVelocity i sygnał powoduje wywołanie drugiego bloku i ustalenia prędkości 2000. W kolejnym cyklu First.InVelocity jest resetowane i załączone First.CommandAborted. W wyniku czego Execute w drugim bloku jest resetowane. Gdy oś osiągnie prędkość 2000, załączony jest Second.InVelocity.
- Prawa część diagramu czasu pokazuje przypadek, gdy drugi blok rozpoczyna działanie gdy pierwszy blok działa i nie załączył In Velocity. Pierwszy blok zostaje załączony przez zmienną GO w wejściu First.Execute. Gdy pierwszy blok jest w stanie przyśpieszania w celu osiągnięcia prędkości 3000, działanie zostaje przerwane a sygnał testowy rozpocznie działanie drugiego bloku. Oś zwalania w celu osiągnięcia prędkości 2000.
9. MC Torque Control
Ten blok funkcyjny stale wywiera moment obrotowy lub siłę o konkretnej wartości. Wartość jest uzyskiwana używając zdefiniowanej rampy (TorqueRamp). Blok funkcyjny ustawia wyjście InTorque jeśli osiągnięto zadaną wartość momentu obrotowego. Ten blok funkcyjny ma zastosowanie do siły i momentu obrotowego. Gdy nie ma obciążenia zewnętrznego, obowiązuje siła. Dodatni moment obrotowy jest w dodatnim kierunku prędkości.
- Ujemny moment * ujemny kierunek = dodatni moment.
- Do zatrzymania ruchu, blok funkcyjny musi być przerwany poprzez wywołanie innego bloku.
- Ruch jest ograniczony przez prędkość, przyśpieszenie/zwalnianie i zryw lub wartość momentu w zależności od mechaniki.
- Dodatkowe testy mogą być przeprowadzane poza blokiem np. sprawdzanie pokonanej pozycji na podstawie śledzenia aktualnej pozycji podczas pracy.
- Prędkość jest limitem wejściowym i zawsze ma wartość dodatnią. Kierunek zależy od momentu obrotowego i obciążenia.
- Oś przestaje być w trybie sterowania momentem obrotowym gdy jakikolwiek blok funkcyjny kontroli ruchu (nie administracyjny) jest załączony na osi.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Continuous Update |
Jeśli WŁ, parametry wejściowe są weryfikowane w każdym cyklu |
|
D |
Torque |
Wartość momentu (Moment lub siła w ustawionych jednostkach [u]). Tysięczne części momentu znamionowego |
|
E |
Torque Ramp |
Maksymalna pochodna czasu ustawionej wartości momentu lub siły (w ustawionych jednostkach [u/s]) |
|
F |
Direction |
Wartości numeryczne: 0 – kierunek dodatni, (1 – najkrótsza droga, nie dotyczy), 2 – kierunek ujemny, 3 – aktualny kierunek |
|
G |
In Torque |
Bit: WŁ, gdy osiągnięto żądany moment lub siłę |
|
H |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
I |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
J |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
K |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
L |
Error ID |
Wartość wskazuje kod błędu |
Poniższy przykład pokazuje typowe zachowanie pośredniego obciążenia z inercją.
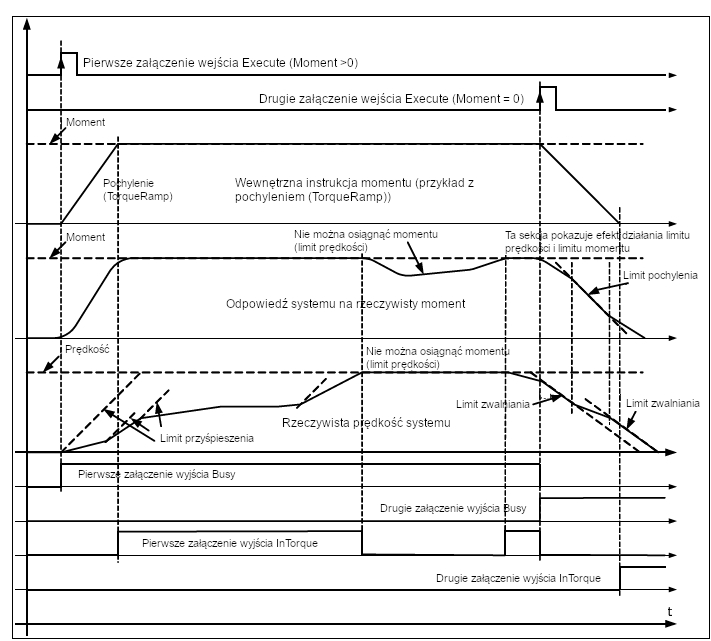
Przykład może być zaimplementowany za pomocą poniższych bloków funkcyjnych:

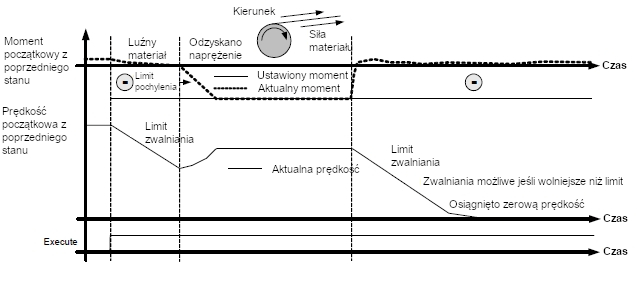
W drugim przykładzie (poniżej) zastosowano przeciwne znaki Direction i Torque (Kontrola retencji lub hamowania). W bloku funkcyjnym Direction+, Torque-. Takie rozwiązanie stosuje się do aplikacji, gdzie następuje rozwijanie materiału po czym jego pęknięcie. W momencie pęknięcia (środkowa część rysunku) następuje spadek rzeczywistej wartości momentu obrotowego (w ujęciu absolutnym): nastąpi spadek prędkości ograniczony limitem zwalniania do zera określonym w Deceleration (brak napięcia istnieje ryzyko wstrząsów, więc należy najszybciej ograniczyć). W tym wypadku ustawiona wartość momentu może nie zostać osiągnięta.
W aplikacji rozwijania (pochodzące z sterowania hamulcem), celem jest naprężenie materiału a nie moment obrotowy silnika. W celu przekształcenia „Nastawy naprężenia użytkownika (User tension setpoint)” należy wziąć pod uwagę chwilową średnicę rolki. Również dodatkowa kompensacja bezwładności poprzez modyfikację wartości zadanej momentu dla przyspieszenia/hamowania jest powszechna na podstawie chwilowych danych dotyczących masy (masa jest zwykle szacowana na podstawie średnicy). Dodatkowo w zastosowaniach rozwijania, w przypadku luźnego materiału (ten sam stan, co pęknięcie materiału), zwykle stosuje się ujemną powolną prędkość odniesienia w celu „zwinięcia” luźnego materiału. W takim przypadku musi to być zapewnione przez oprogramowanie zewnętrzne.
10. MC Apply Torque
Ten blok funkcyjny pozwala na ustawienie momentu i zastosowanie zgodnie z wartościami fizycznymi ustawionymi w konfiguracji osi, niezależnie od specyfikacji serwosilnika.
Funkcja ciągle monitoruje aktualny moment i podnosi go do określonej wartości. Wartość jest uzyskiwana używając zdefiniowanej rampy (TorqueRamp). Blok funkcyjny ustawia wyjście InTorque jeśli osiągnięto zadaną wartość momentu obrotowego. Dodatni moment obrotowy jest w dodatnim kierunku prędkości.
- Ujemny moment * ujemny kierunek = dodatni moment.
- Do zatrzymania ruchu, blok funkcyjny musi być przerwany poprzez wywołanie innego bloku.
- Ruch jest ograniczony przez prędkość, przyśpieszenie/zwalnianie i zryw lub wartość momentu w zależności od mechaniki.
- Dodatkowe testy mogą być przeprowadzane poza blokiem np. sprawdzanie pokonanej pozycji na podstawie śledzenia aktualnej pozycji podczas pracy.
- Prędkość jest limitem wejściowym i zawsze ma wartość dodatnią. Kierunek zależy od momentu obrotowego i obciążenia.
- Oś przestaje być w trybie sterowania momentem obrotowym gdy jakikolwiek blok funkcyjny kontroli ruchu (nie administracyjny) jest załączony na osi.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Continuous Update |
Jeśli WŁ, parametry wejściowe są weryfikowane w każdym cyklu |
|
D |
Torque |
Wartość momentu (Moment lub siła w ustawionych jednostkach [u]). Tysięczne części momentu znamionowego |
|
E |
Torque Ramp |
Maksymalna pochodna czasu ustawionej wartości momentu lub siły (w ustawionych jednostkach [u/s]) |
|
F |
Direction |
Wartości numeryczne: 0 – kierunek dodatni, (1 – najkrótsza droga, nie dotyczy), 2 – kierunek ujemny, 3 – aktualny kierunek |
|
G |
In Torque |
Bit: WŁ, gdy osiągnięto żądany moment lub siłę |
|
H |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
I |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
J |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
K |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
L |
Error ID |
Wartość wskazuje kod błędu |
11. MC Apply Force
Ten blok funkcyjny pozwala na ustawienie siły i zastosowanie zgodnie z wartościami fizycznymi ustawionymi w konfiguracji osi, niezależnie od specyfikacji serwosilnika.
Funkcja ciągle monitoruje aktualną siłę i podnosi ją do określonej wartości. Wartość jest uzyskiwana używając zdefiniowanej rampy (ForceRamp). Blok funkcyjny ustawia wyjście InForce jeśli osiągnięto zadaną wartość siły. Dodatnia siła jest w dodatnim kierunku prędkości.
- Ujemna siła * ujemny kierunek = dodatnia siła.
- Do zatrzymania ruchu, blok funkcyjny musi być przerwany poprzez wywołanie innego bloku.
- Ruch jest ograniczony przez prędkość, przyśpieszenie/zwalnianie i zryw lub wartość sily w zależności od mechaniki.
- Dodatkowe testy mogą być przeprowadzane poza blokiem np. sprawdzanie pokonanej pozycji na podstawie śledzenia aktualnej pozycji podczas pracy.
- Prędkość jest limitem wejściowym i zawsze ma wartość dodatnią. Kierunek zależy od momentu obrotowego i obciążenia.
- Oś przestaje być w trybie sterowania siłą gdy jakikolwiek blok funkcyjny kontroli ruchu (nie administracyjny) jest załączony na osi.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Continuous Update |
Jeśli WŁ, parametry wejściowe są weryfikowane w każdym cyklu |
|
D |
Force |
Wartość momentu (Moment lub siła w ustawionych jednostkach [u]). Tysięczne części momentu znamionowego |
|
E |
Force Ramp |
Maksymalna pochodna czasu ustawionej wartości momentu lub siły (w ustawionych jednostkach [u/s]) |
|
F |
Direction |
Wartości numeryczne: 0 – kierunek dodatni, (1 – najkrótsza droga, nie dotyczy), 2 – kierunek ujemny, 3 – aktualny kierunek |
|
G |
In Force |
Bit: WŁ, gdy osiągnięto żądany moment lub siłę |
|
H |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
I |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
J |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
K |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
L |
Error ID |
Wartość wskazuje kod błędu |
12. MC Set Position
Ten blok funkcyjny przesuwa układ współrzędnych osi poprzez manipulowanie zarówno pozycją zadaną, jak i rzeczywistą pozycją osi o tej samej wartości, bez powodowania żadnego ruchu. (Ponowna kalibracja z tym samym następującym błędem).
- Relative oznacza, że wartość pozycji jest dodana do aktualnej pozycji osi w czasie działania. Powoduje kalibrację o określoną odległość. Absolute oznacza, że aktualna wartość pozycji jest ustawiana do konkretnej wartości odpowiadającej parametrowi Position.
- Oś musi być w stanie Standstill do wykonania funkcji.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Position |
Wartość pozycji [u] (Oznacza odległość jeśli Relative = 1) |
|
D |
Relative |
0: Aktualna wartość pozycji osi jest ustawiana zgodnie z wartością parametru Position 1: Dodaje wartość pozycji z parametru Position do aktualnej pozycji w czasie wykonywania |
|
E |
Done |
Bit: WŁ, gdy oś osiągnęła pozycję |
|
F |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
G |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
H |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
I |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
J |
Error ID |
Wartość wskazuje kod błędu |
13. MC Reset
Ten blok funkcyjny odpowiada za przejście z stanu ErroStop do Standstill lub Disabled poprzez resetowanie wszystkich wewnętrznych błędów związanych z osią. Nie wpływa na wyjścia bloków funkcyjnych.
- Jeśli oś nie jest w stanie Errorstop, bit Done pozostaje załączony.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Done |
Bit: WŁ, gdy oś osiągnęła pozycję |
|
D |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
E |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
F |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
G |
Error ID |
Wartość wskazuje kod błędu |
14. MC Jog
Ten blok funkcyjny nie jest definiowany w PLCOpen, funkcja dodana przez Unitronics.
- Ruch JOG do przodu i tyłu nie może być wykonywany w tym samym czasie.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być kontrolowana |
|
B |
Jog Forward |
Zbocze narastające wywołuje obrót JOG do przodu |
|
C |
Jog Backward |
Zbocze narastające wywołuje obrót JOG do tyłu |
|
D |
Velocity |
Maksymalna wartość prędkości (nie koniecznie osiągnięta) [u/s] |
|
E |
Acceleration |
Wartość przyśpieszenia (zawsze dodatnia) (zwiększenie energii silnika) [u/s2] |
|
F |
Deceleration |
Wartość zwalniania (zawsze dodatnia) (zmniejszenie energii silnika) [u/s2] |
|
G |
Jerk |
Wartość zrywu [u/s3] (zawsze dodatnia). Ważne tylko gdy wybrano profil ruchu Krzywa-S |
|
H |
Done |
Jeśli w trybie JOG: osiągnięto zadaną prędkość lub prędkość 0 |
|
I |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
J |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
K |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
L |
Error ID |
Wartość wskazuje kod błędu |
15. MC Read
Ten blok funkcyjny zwraca konkretną wartość parametru odpowiednio do numerów ID parametrów.
Aktywuje go zbocze narastające bitu Enable.
- Tak długo jak bit Enable jest WŁ, blok funkcyjny będzie próbował odczytać wartość parametru.
- Numer parametru może być modyfikowany bez konieczności resetowania bitu Enable.
- Przy wysokiej ilości stale aktywnych bloków MC Read może dojść do osłabienia wydajności sieci w wyniku przeciążenia.
- Odczyt parametru Alarm Code nie jest zalecany, ponieważ PLC automatycznie aktualizuje to pole co sekundę i maskuje początkową wartość w napędzie wartością FF00. Automatyczne okresowe odczyty usuwają wprowadzającą w błąd maskę; oznacza to, że jeśli monitorujesz parametr w trybie online UniLogic, zobaczysz aktualną wartość kodu alarmu, podczas gdy odczyt tego samego parametru za pomocą PC Read pokaże tylko zamaskowaną wartość.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być zasilana |
|
B |
Enable |
Kiedy WŁ, moc zostaje dostarczona do serwosterownika, który jest powiązany z osią |
|
C |
Parameter number |
Używaj do określenia numeru parametru do odczytu |
|
D |
A valid set of outputs is available |
Jeśli WŁ, zbiór wyjść jest dostępny dla bloku funkcyjnego |
|
E |
Busy |
Blok funkcyjny aktualnie steruje osią |
|
F |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
G |
Error ID |
Wartość wskazuje kod błędu |
16. MC Write
Ten blok funkcyjny wpisuje konkretną wartość do parametru odpowiednio do numerów ID parametrów.
Aktywuje go zbocze narastające bitu Execute.
- Blok funkcyjny zapisze wartość parametru jednokrotnie, gdy wystąpi zbocze narastające bitu Execute.
- Jeśli MC Write z powodzeniem zapisze parametr do serwosterownika, blok funkcyjny nadpisze odpowiednie wartości w strukturze osi.
|
|
Nazwa parametru |
Opis |
|
A |
Axis |
Wybór osi, która ma być zasilana |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Parameter number |
Używaj do określenia numeru parametru do zapisu |
|
D |
Done |
Nadpisano wartość parametru |
|
E |
Busy |
Blok funkcyjny aktualnie steruje osią |
|
F |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
G |
Error ID |
Wartość wskazuje kod błędu |
Bloki funkcyjne EtherCAT
Wraz z wersją UniLogic 1.33.200 dodano nową funkcjonalność do serwonapędów EtherCAT umożliwiając wieloosiową synchronizację.
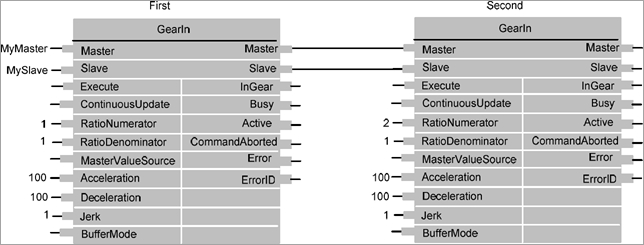
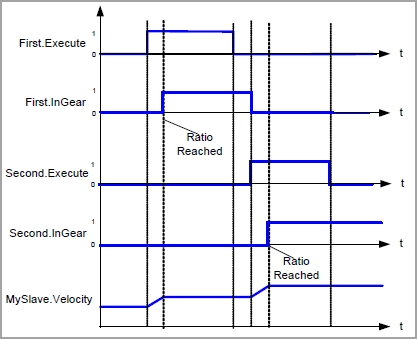
1. MC GearIn
Blok paruje oś master i oś slave z odpowiednim współczynnikiem przełożenia prędkości pomiędzy osiami. Oś slave’a podąża za ruchem osi master’a (sychronizacja prędkości). Wartość wejściowa licznika i dzielnika pozwala na ustawienie odpowiedniego przełożenia ruchu dla osi slave.
- Rampa slave’a rośnie zgodnie z przełożeniem prędkości master’a i blokuje gdy zostanie osiągnięta. Każdy zgubiony dystans podczas synchronizacji nie zostanie nadrobiony.
- Wartość przełożenia może być zmieniana podczas działania bloku GearIn (bez potrzeby użycia GearOut).
- Po osiągnięciu „InGear” pozycja lub prędkość jest blokowana w systemie.
|
|
Nazwa parametru |
Opis |
|
A |
Master Axis |
Wybór osi master |
|
B |
Slave Axis |
Wybór osi slave |
|
C |
Execute |
Wywołuje zbocze narastające |
|
D |
Continuous Update |
Jeśli WŁ, parametry wejściowe są weryfikowane w każdym cyklu |
|
E |
Gear Ratio Numerator |
Licznik przełożenia |
|
F |
Gear Ratio Denominator |
Dzielnik przełożenia |
|
G |
Acceleration |
Maksymalne przyśpieszenie podczas różnicy czasu w „Start-Sync” i „InSync”
EtherCAT: Zwalnianie nie jest używane w EtherCAT, zamiast tego będzie użyta wartość przyśpieszenia |
|
H |
Jerk |
Wartość zrywu [u/s3] (zawsze dodatnia). Ważne tylko gdy wybrano profil ruchu Krzywa-S |
|
I |
In Gear |
Bit: WŁ, gdy osiągnięto żądaną wartość |
|
J |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
K |
Active |
Blok funkcyjny aktualnie steruje osią (operacje buforowane nie są obecnie obsługiwane) |
|
L |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny wyłączeniem zasilania, nie ma innego sposobu na anulowanie instrukcji Stop |
|
M |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
N |
Error ID |
Wartość wskazuje kod błędu |
2. MC GearOut
Blok rozłącza oś slave od osi master
- Zakłada się, że ta komenda jest poprzedzona innym blokiem np. MC_Stop, MC_GearIn lub innym blokiem. Jeśli nie ma innej komendy to domyślnie zostanie utrzymana ostatnia prędkość.
|
|
Nazwa parametru |
Opis |
|
A |
Slave Axis |
Wybór osi slave |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Done |
WŁ, gdy rozłączenie jest ukończone |
|
D |
Busy |
Blok funkcyjny aktualnie steruje osią |
|
E |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
F |
Error ID |
Wartość wskazuje kod błędu |
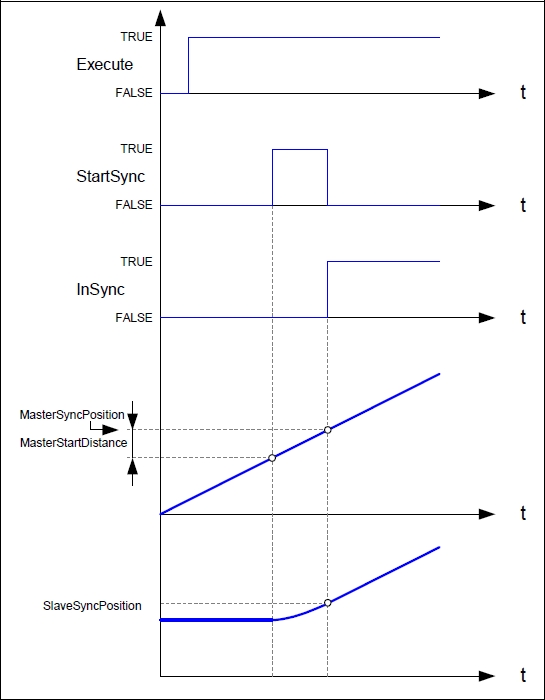
3. MC GearInPos
Blok zarządza przełożeniem pomiędzy pozycją osi slave’a i master’a od punktu sychronizacji.
- Jeśli „MasterStartDistance” jest zaimplementowany to jakikolwiek wcześniejszy ruch jest kontynuowany dopóki oś master nie przekroczy „Master-SyncPosition” i „MasterStartDistance” w odpowiednim kierunku (zgodnie z znakiem „MasterStartDistance”).
- Jeśli „MasterStartDistance” nie jest wymieniony to system wylicza punkt „StartSync” bazując na pozostałych danych wejściowych.
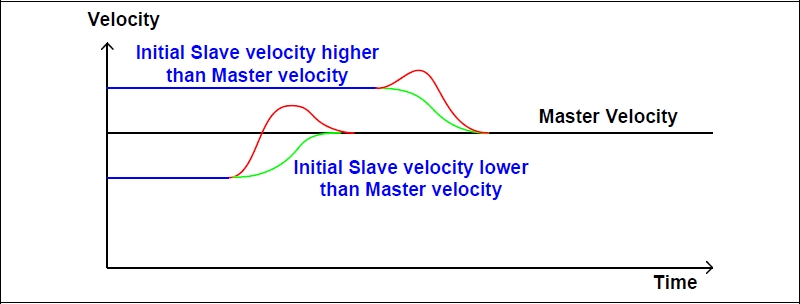
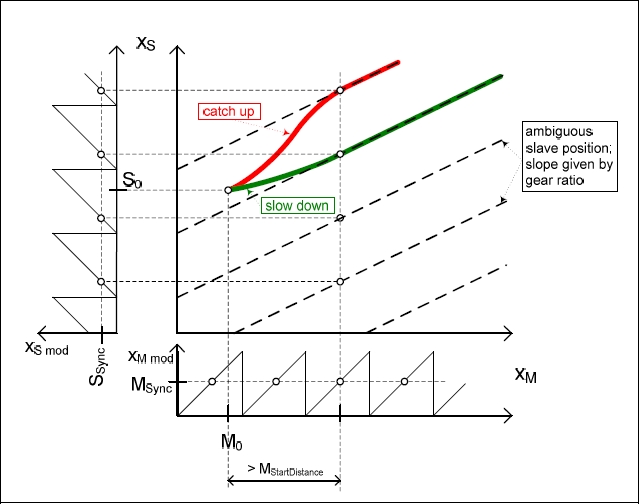
- Różnica pomiędzy „SyncModes”, „CatchUp” i „SlowDown” leży w energii potrzebnej do synchronizacji. „SlowDown” potrzebuje mniej energii niż „CatchUp”.
|
|
Nazwa parametru |
Opis |
|
A |
Master Axis |
Wybór osi master |
|
B |
Slave Axis |
Wybór osi slave |
|
C |
Execute |
Wywołuje zbocze narastające |
|
D |
Gear Ratio Numerator |
Licznik przełożenia |
|
E |
Gear Ratio Denominator |
Dzielnik przełożenia |
|
F |
MasterSyncPosition |
Pozycja osi master w profilu CAM, gdzie slave jest w synchronizacji z master’em (Jeśli „MasterSyncPosition” nie istnieje w pierwszym punkcie profilu CAM, to master i slave są zsynchronizowane) Uwaga: wejściowe przyśpieszenie, zwalnianie i zryw nie są tutaj dodawane |
|
G |
SlaveSyncPosition |
Pozycja slave’a w których osie są w synchronizacji |
|
H |
SyncMode |
Definiuje sposób synchronizacji mcSlowDown – synchronizacja na aktualnym cyklu slave’a, mcCatchUp – synchronizacja na następnym cyklu slave’a |
|
I |
MasterStartDistance |
Odległość master’a dla rozpoczęcia przełożenia (kiedy oś slave rozpoczęła synchronizację) |
|
J |
Velocity |
Maksymalna prędkość podczas różnicy czasowej w „Start-Sync” i „In-Sync” |
|
K |
Acceleration |
Maksymalne przyśpieszenie podczas różnicy czasowej w „Start-Sync” i „In-Sync” |
|
L |
Jerk |
Maksymalny zryw podczas różnicy czasowej w „Start-Sync” i „In-Sync”, jeśli profil ruchu został ustawiony na krzywą-S |
|
M |
StartSync |
WŁ, rozpoczyna synchronizację |
|
N |
InSync |
WŁ, kiedy ustawiona wartość jest równa wartości komendy (jeśli przeliczony zbiór wartości różni się od pozycji master’a i przełożenia) |
|
O |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
P |
Active |
Blok funkcyjny aktualnie steruje osią |
|
Q |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny za pomocą innego bloku |
|
R |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
S |
Error ID |
Wartość wskazuje kod błędu |
Diagram czasowy dla MC_GearInPos
Różnica pomiędzy „SyncModes” – „SlowDown” (zielony) i „CatchUp” (czerwony) z różnymi prędkościami początkowymi slave’a.
Przykład MC_GearInPos, gdzie początkowa prędkość slave’a jest w tym samy kierunku co master’a.
4. MC CombineAxes
Blok łączy ruch 2 osi do trzeciej osi z wyborem metody łączenia. Jest to obliczenie nowej pozycji bazując na wartości zadanej pozycji osi wejściowych. Diagram stanów jest zgodny z blokami synchronizacji ruchu. Jako przykład może działać z oddzielnymi profilami zsynchronizowanymi do obiektu z przekładnią taśmową, nożem obrotowym.
- Do zatrzymania ruchu, blok musi być przerwany poprzez działanie innego bloku.
|
|
Nazwa parametru |
Opis |
|
A |
Master Axis 1 |
Wybór pierwszej osi master |
|
B |
Master Axis 2 |
Wybór drugiej osi master |
|
C |
Slave Axis |
Wybór osi slave |
|
D |
Execute |
Wywołuje zbocze narastające |
|
E |
Continuous Update |
Jeśli WŁ, parametry wejściowe są weryfikowane w każdym cyklu |
|
F |
CombineMode |
Definiuje sposób łączenia w AxisOut: mcAddAxes: Dodanie pozycji 2 osi wejściowych mcSubAxes: Odjęcie pozycji 2 osi wejściowych |
|
G |
Gear Ratio Numerator M1 |
Licznik współczynnika przełożenia master’a osi 1 do slave’a |
|
H |
Gear Ratio Denominator M1 |
Dzielnik współczynnika przełożenia master’a osi 1 |
|
I |
Gear Ratio Numerator M2 |
Licznik współczynnika przełożenia master’a osi 2 do slave’a |
|
J |
Gear Ratio Denominator M2 |
Dzielnik współczynnika przełożenia master’a osi 2 |
|
K |
InSync |
WŁ, kiedy ustawiona wartość jest równa wartości komendy |
|
L |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
M |
Active |
Blok funkcyjny aktualnie steruje osią |
|
N |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny za pomocą innego bloku |
|
O |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
P |
Error ID |
Wartość wskazuje kod błędu |
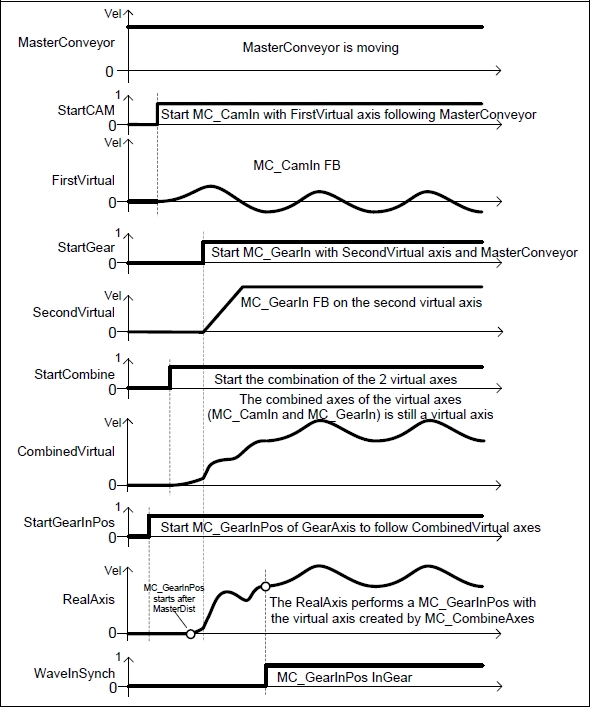
Blok może wygenerować specjalnie zsynchronizowane ruchy, które nie są możliwe lub zbyt skomplikowane do wygenerowania w inny sposób. W poniższym przykładzie blok CAM i rezultat bloku Gear zsynchronizowane z master’em przenośnika taśmowego są dodane do wygenerowania wirtualnego master’a dla MC_GearInPos, która będzie wykonywała ruch. Aplikacją zgodną z tym przykładem mogłaby być np. maszyna do układanie falistych warstw lodów. Oś dozująca musi być zsynchronizowana z falowaniem i przenośnikiem taśmowym transportującym bazę. Musi rozpocząć w konkretnej pozycji fazę falowania do osiągnięcia odpowiedniego rezultatu (stąd GearInPos). Z blokiem CAM można z łatwością zdefiniować różne wzorce fal.

Przykładowy diagram czasowy dla MC_CombineAxes.
5. MC CamTableSelect
Wybiera tabelę krzywki CAM.
Oś wirtualna może zostać użyta jako oś master’a
- MC_CAM_REF dostarcza dane konkretnego typu
- MC_CAM_ID dostarcza dane konkretnego typu
|
|
Nazwa parametru |
Opis |
|
A |
Master Axis |
Wybór osi master |
|
B |
Slave Axis |
Wybór osi slave |
|
C |
CAM Table Index |
Referencja tabeli CAM |
|
D |
Execute |
Wywołuje zbocze narastające |
|
E |
Periodic |
1 – periodycznie, 0 – jednorazowo |
|
F |
MasterAbsolute |
1 – absolutnie, 0 – relatywne współrzędne |
|
G |
SlaveAbsolute |
1 – absolutnie, 0 – relatywne współrzędne |
|
H |
Done |
Wstępny wybór ukończony |
|
I |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
J |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
K |
Error ID |
Wartość wskazuje kod błędu |
|
L |
CamTableID |
Identyfikator tabeli CAM używanej w bloku MC_CamIn |
6. MC CamIn
Blok funkcyjny realizujący krzywkę CAM.
- Nie jest wymagane, aby master był stacjonarny
- Jeśli pozycje master’a i slave’a nie zgadzają się z wartościami offsetu, kiedy MC_CamIn jest realizowany, to wystąpi błąd lub system zniweluje go automatycznie.
- CAM jest realizowany jako absolutny lub relatywny względem aktualnej pozycji master’a i slave’a
- Absolutnie – powiązanie pomiędzy profilem master’a i slave’a jest widziane jako absolutne
- Relatywne - powiązanie pomiędzy profilem master’a i slave’a jest widziane jako relatywne
- Ramp-In jest dodatkowym trybem dostawcy. Może być połączony z dodatkowymi parametrami, jak odległość master’a, przyśpieszenie, lub inne specyficzne dla danego dostawcy.
- Ten blok nie został złączony z MC_CamTableSelect ponieważ separacja umożliwia zmiany w locie.
- Mechaniczna analogia offsetu slave’a to dołączona warstwa o pewnej grubości do krzywki. Z tego względu krzywka ma stały offset, który może być interpretowany jako offset wału osi master’a.
|
|
Nazwa parametru |
Opis |
|
A |
Master Axis |
Wybór osi master’a |
|
B |
Slave Axis |
Wybór osi slave’a |
|
C |
Execute |
Wywołuje zbocze narastające |
|
D |
Master Offset |
Offset osi wału master’a względem osi krzywki |
|
E |
Slave Offset |
Offset tabeli slave’a |
|
F |
Master Scaling |
Współczynnik dla profilu master’a (domyślnie = 1.0). Z punktu widzenia slave’a, profil master’a jest przemnożony przez współczynnik |
|
G |
Slave Scaling |
Współczynnik dla profilu slave’a (domyślnie = 1.0). Profil slave’a jest przemnożony przez współczynnik |
|
H |
Master Start Distance |
Odległość master’a po której następuje synchronizacja z slave’em |
|
I |
Master Sync Position |
Pozycja master’a w profilu krzywki CAM, gdzie slave jest w synchronizacji z master’em (jeśli „MasterSyncPosition” nie istnieje, pierwszy punktu master’a i slave’a jest synchronizowany) |
|
J |
CamTableID |
Identyfikator tabeli CAM, polinkowany do wyjścia MC_CamTableSelect |
|
K |
InSync |
WŁ, kiedy ustawiona wartość jest równa wartości komendy |
|
L |
Busy |
Bit: WŁ, gdy blok funkcyjny steruje osią |
|
M |
Active |
Blok funkcyjny aktualnie steruje osią |
|
N |
Command aborted |
Bit: WŁ, gdy anulowano blok funkcyjny za pomocą innego bloku |
|
O |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
P |
Error ID |
Wartość wskazuje kod błędu |
7. MC CamOut
Blok odłącza natychmiastowo oś slave’a od osi master’a.
- Zakłada się, że ta komenda jest poprzedzona innym blokiem np. MC_Stop, MC_GearIn lub innym blokiem. Jeśli nie ma innej komendy to domyślnie zostanie utrzymana ostatnia prędkość.
|
|
Nazwa parametru |
Opis |
|
A |
Slave Axis |
Wybór osi slave |
|
B |
Execute |
Wywołuje zbocze narastające |
|
C |
Done |
WŁ, gdy rozłączenie jest ukończone |
|
D |
Busy |
Blok funkcyjny aktualnie steruje osią |
|
E |
Error bit |
WŁ kiedy wykryto błąd w bloku funkcyjnym |
|
F |
Error ID |
Wartość wskazuje kod błędu |
Aby uzyskać dostęp do większej liczby lekcji, powróć na stronę startową kursu.
Jeśli masz pytania, skontaktuj się z nami pod adresem e-mail: sterowniki@elmark.com.pl . Chętnie wysłuchamy również każdą konstruktywną krytykę na temat jakości tego kursu.