
Cobot UR20 Universal Robots
Cena od 210 600,00 zł netto
Przy złożeniu zamówienia do godziny 15:00 paczka zostanie wysłana jeszcze tego samego dnia W magazynie
Koszyk
Jakie korzyści płyną z wbudowanego czujnika siły w robocie Universal Robots e-Series?
Istnieje wiele elementów, które odróżniają roboty współpracujące Universal Robots e-Series od serii CB3.1. Są to między innymi lżejsza skrzynka sterownicza, większa liczba funkcji bezpieczeństwa, czy też większa dokładność (wszystkie różnice między seriami znajdziecie tutaj). Ta ostatnia wynika bezpośrednio z najważniejszej zmiany charakteryzującej nową generację cobotów – zastosowanie wbudowanego czujnika siły w kołnierzu robota. Pozwala on na uzyskanie znacznie dokładniejszych odczytów wartości siły, którą obciążony jest cobot. W poprzedniej serii dokładność odczytów wynosiła ok. 10 N. Nowa generacja robotów współpracujących gwarantuje odczyty z dokładnością ok. 3,5 N.
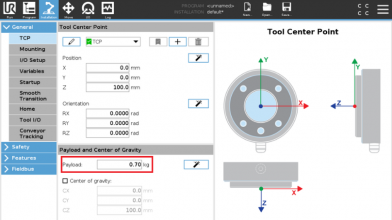
Zastosowanie wbudowanego czujnika siły i momentu wpływa na precyzję ruchów wykonywanych przez cobota. Obliczenia przeprowadzane przez układ sterujący są dokładniejsze, a co za tym idzie, robot jest także mniej podatny na uszkodzenia. Seria e robotów współpracujących Universal Robots umożliwia użytkownikowi także automatyczne obliczenie środka ciężkości oraz ciężaru elementów zamontowanych na kołnierzu cobota. Ułatwia oraz usprawnia to pracę i programowanie.
Zmiany opisane powyżej to nie wszystkie zalety zastosowania nowej generacji robotów Universal Robots. Największym wprowadzonym usprawnieniem jest działanie trybu Siła. Jest to jeden z czterech zaawansowanych szablonów, które zostały wprowadzone przez producenta do usprawnienia działania typowych programów cobota. Pozostałe to Paleta, Wyszukaj oraz Śledzenie Przenośnika.
| Tryb Siła w robotach nowej generacji jest zdecydowanie bardziej przewidywalny, intuicyjny oraz bezproblemowy. Wynika to oczywiście z większych dokładności odczytów siły działających na cobota lub przez niego. Szablon ten jest niezastąpiony w przypadkach, gdy położenie punktu TCP wzdłuż zadanej osi nie ma znaczenia. | ||
| Powoduje on, że pozycja ramienia cobota będzie automatycznie dostosowywana, aby uzyskać daną siłę. Kiedy chcemy poruszać się po nieregularnej powierzchni, pchać bądź ciągnąć element czy też dopasować detal do otworu – tryb Siła to idealne rozwiązanie. Sprawdza się także, gdy trzeba uzyskać jednakowy docisk na całej powierzchni pracy narzędzia. | ||
Dzięki wyżej wymienionym cechom roboty współpracujące Universal Robots idealnie sprawdzają się w aplikacjach wymagających nienagannej czy też wręcz nadludzkiej precyzji. Cobot może pracować z taką samą dokładnością przez całą dobę, 7 dni w tygodniu. Dla człowieka jest to nieosiągalne.
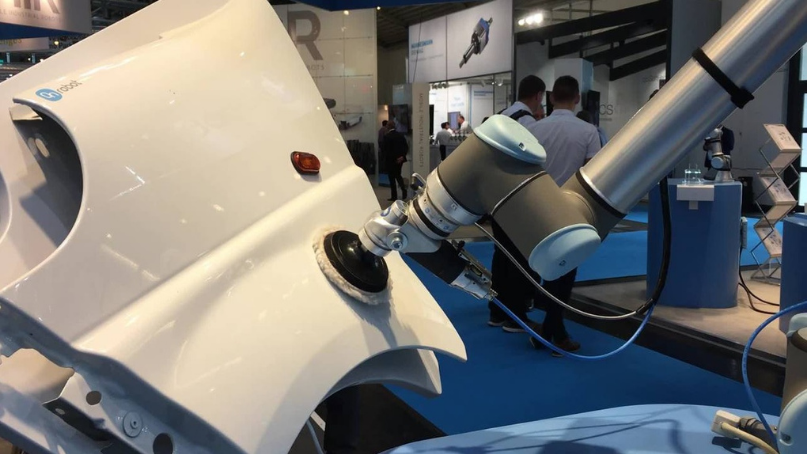
Poprzez użycie wbudowanego czujnika siły, roboty współpracujące Universal Robots sprawdzają się idealnie w aplikacjach polerowania. Niekiedy siła, którą należy użyć przy polerowaniu delikatnych elementów oscyluje w granicach 10 N. Wtedy błąd względny w robotach serii CB3.1 byłby tak duży, że mogłyby występować kłopoty z osiągnięciem wymaganej dokładności. Takie problemy nie pojawiają się w cobotach nowej generacji.
| Jak widać na filmie, roboty współpracujące mogą być i są z powodzeniem wykorzystywane do tego typu aplikacji. Wynoszą one produktywność zakładu na wyższy poziom, dzięki stałej i precyzyjnej pracy. Innymi przykładami aplikacji, w których sprawdza się użycie trybu Siła są między innymi wyszukiwanie przedmiotów, czy też ich dopasowywanie. |
Programowanie robota w trybie Siła jest łatwym i intuicyjnym zadaniem. Coboty, w przeciwieństwie do klasycznych robotów przemysłowych mają prosty interfejs i język programowania. Również zaawansowane szablony, o których wspomniano wcześniej, nie wymagają specjalistycznej wiedzy programistycznej.
Aby użyć trybu Siła, należy wybrać go z menu po lewej stronie w programie robota. Potem należy dodawać każdy ruch oraz punkt orientacyjny „pod” tym trybem, aby odbywał się on z wymuszeniem zadanej siły w danym kierunku. Jeżeli punkt TCP napotka przeszkodę, będzie na nią naciskał, jeżeli nie, to rozpędzi się do zadanej maksymalnej prędkości.
Podstawowym narzędziem wybieranym w trybie Siła jest układ współrzędnych, wzdłuż lub wokół którego osi będzie definiowało się użycie danych sił bądź momentów. Podstawowe układy to Baza oraz Narzędzie. Układ Baza ma swój początek w podstawie cobota, a układ Narzędzie na jego kołnierzu.
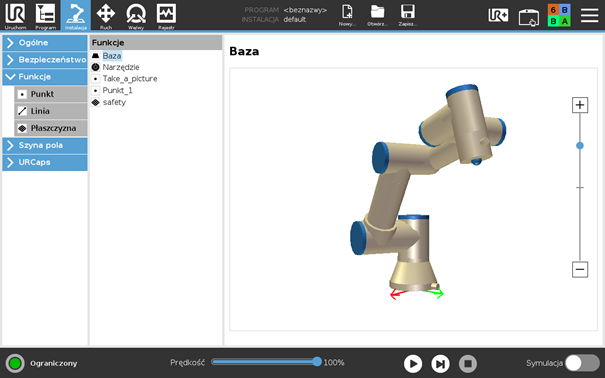
Rys. 1 Układ współrzędnych bazy
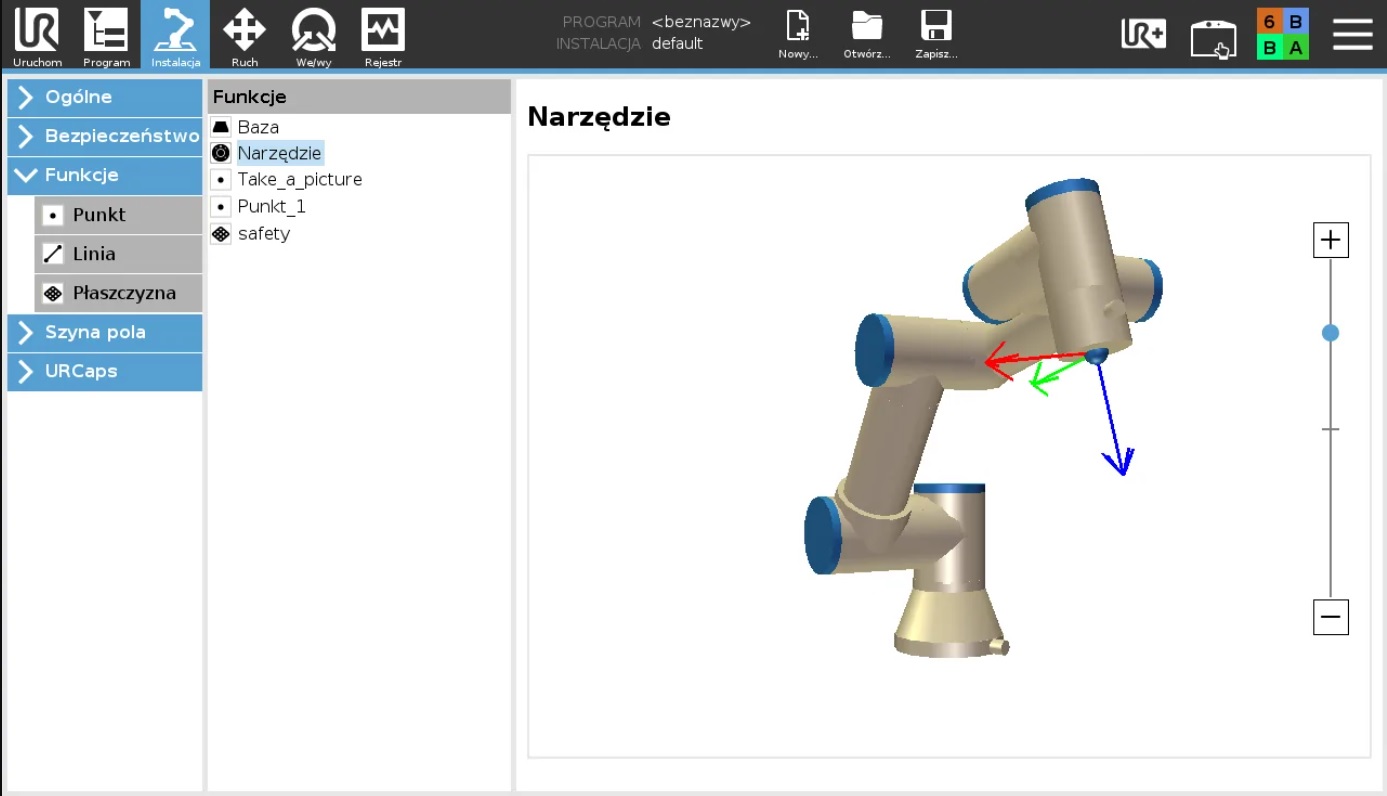
Rys. 2 Układ współrzędnych narzędzia
Jeżeli zachodzi potrzeba, w zakładce Instalacja istnieje możliwość zdefiniowania pożądanych przez użytkownika układów. Jest to przydatne, jeżeli chce się operować trybem siły po powierzchni detalu bądź naciskać prostopadle do jego powierzchni.
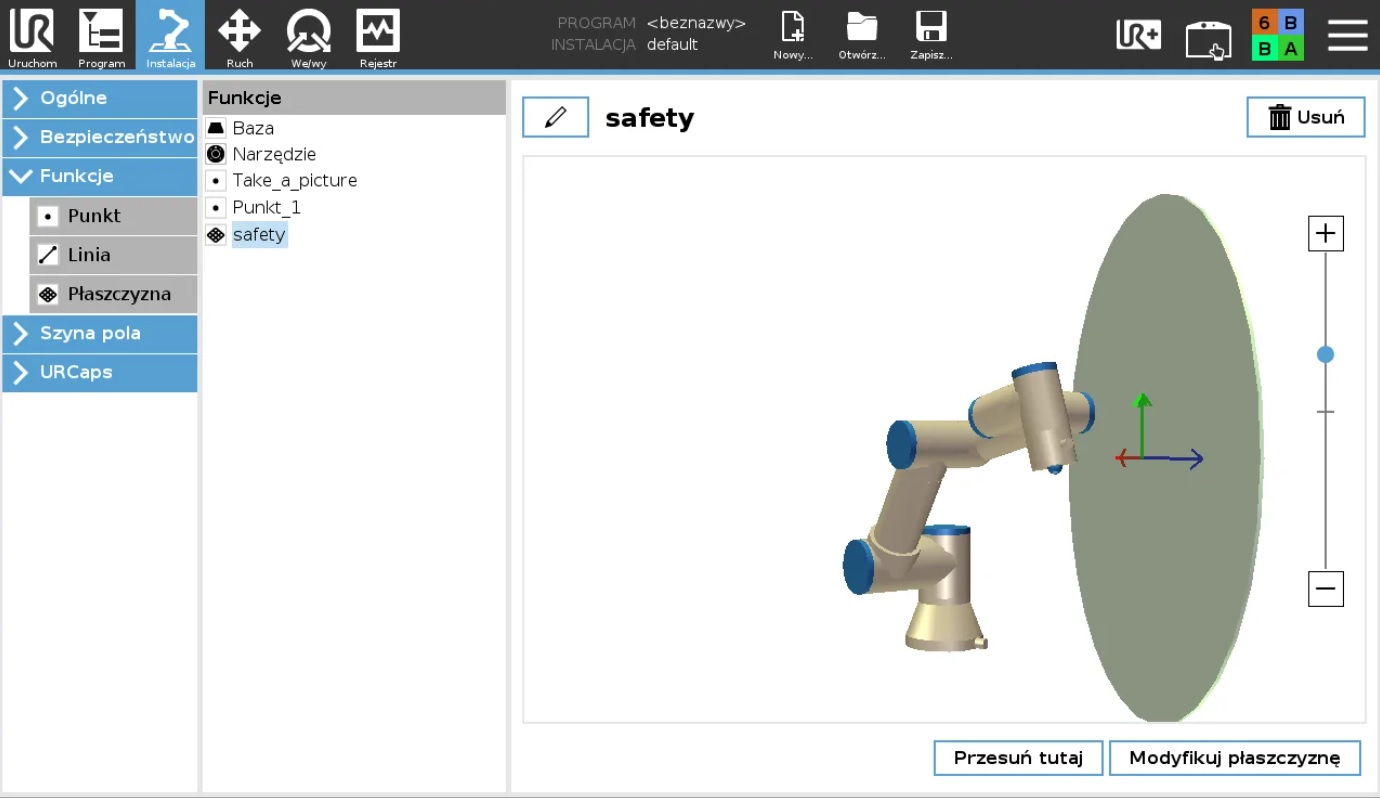
Rys. 3 Płaszczyzna zdefiniowana przez użytkownika wraz z układem współrzędnych
Tryb Siła dzieli się na cztery typy:
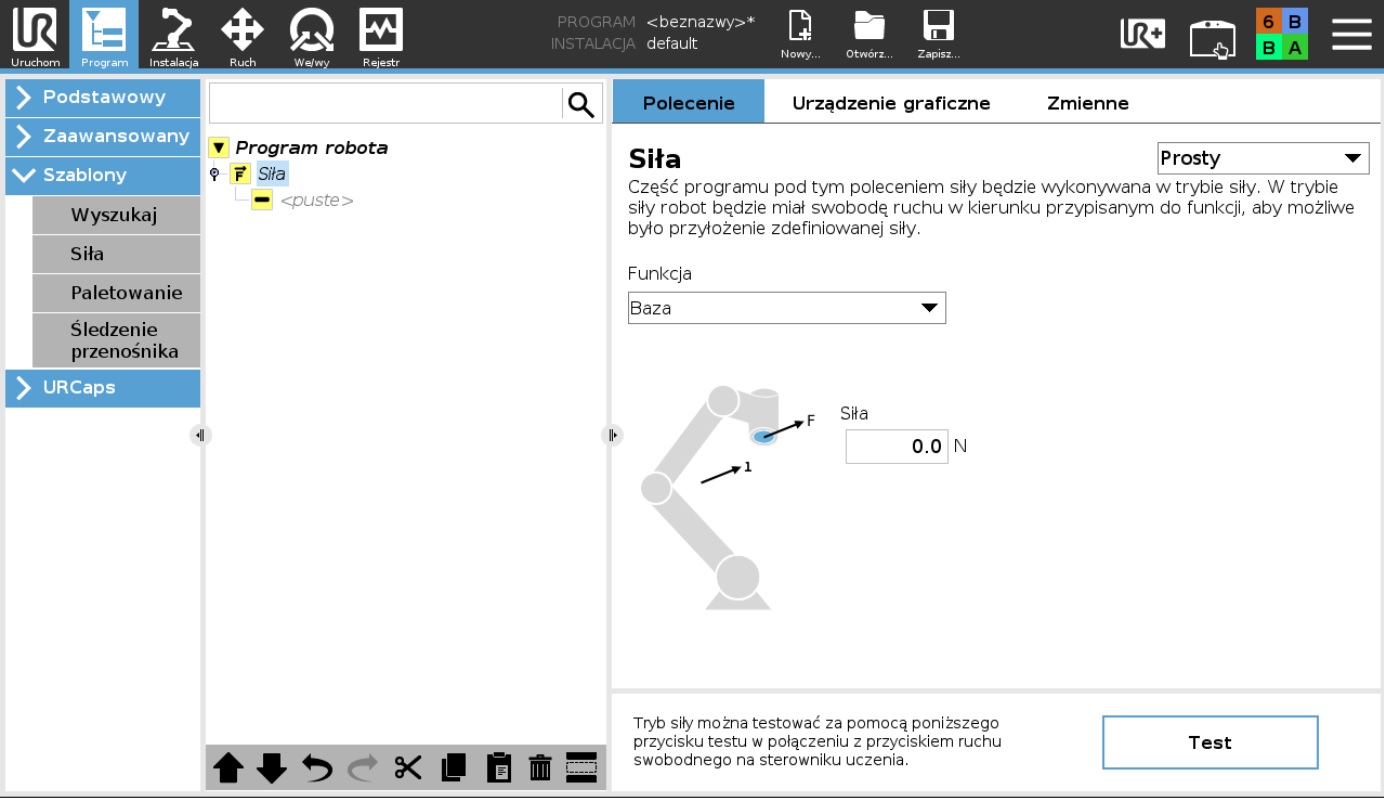
Rys. 4 Tryb Prosty trybu Siła
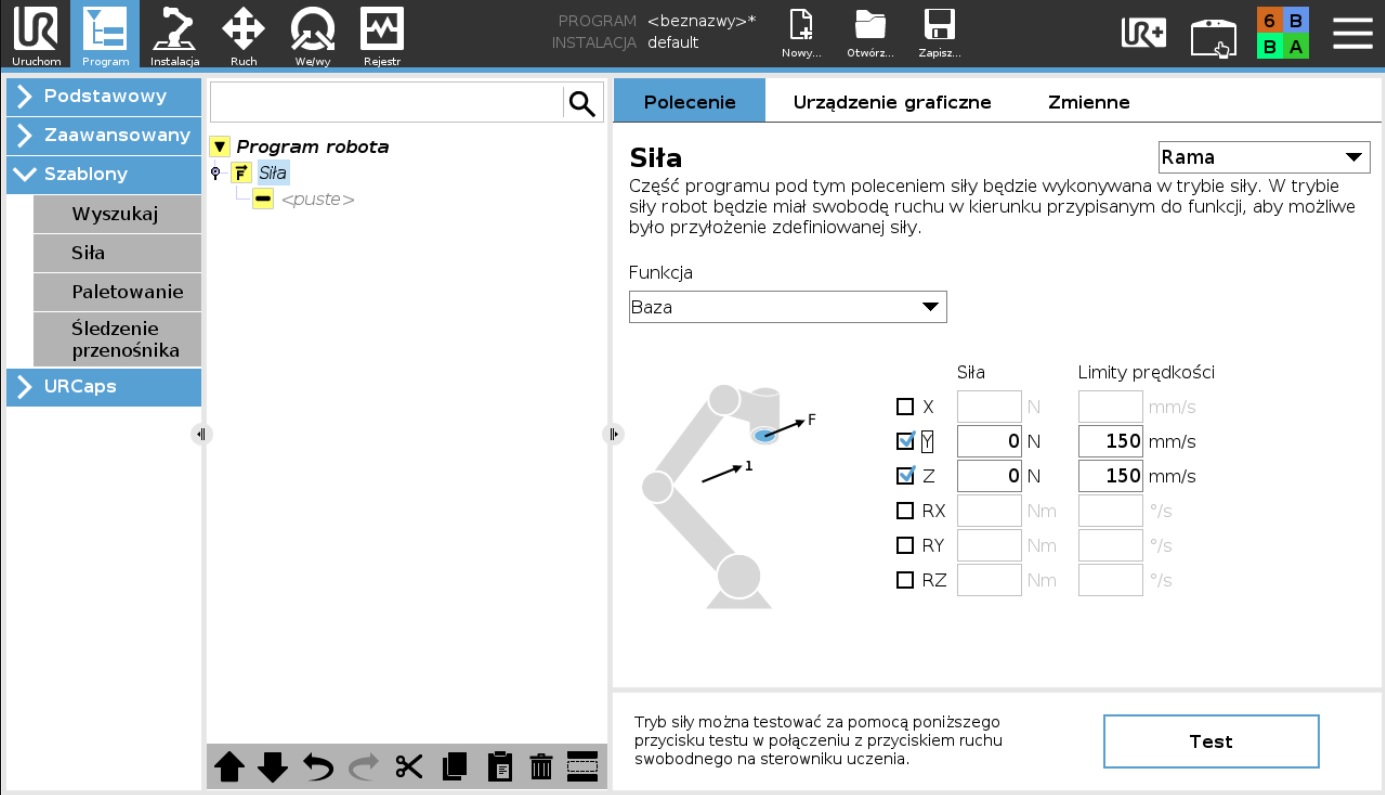
Rys. 5 Tryb Rama trybu Siła
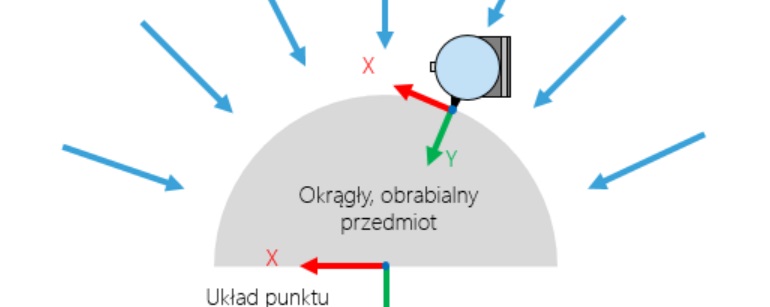
Rys. 6 Uproszczony schemat przedstawiający działanie typu Punkt w trybie Siła
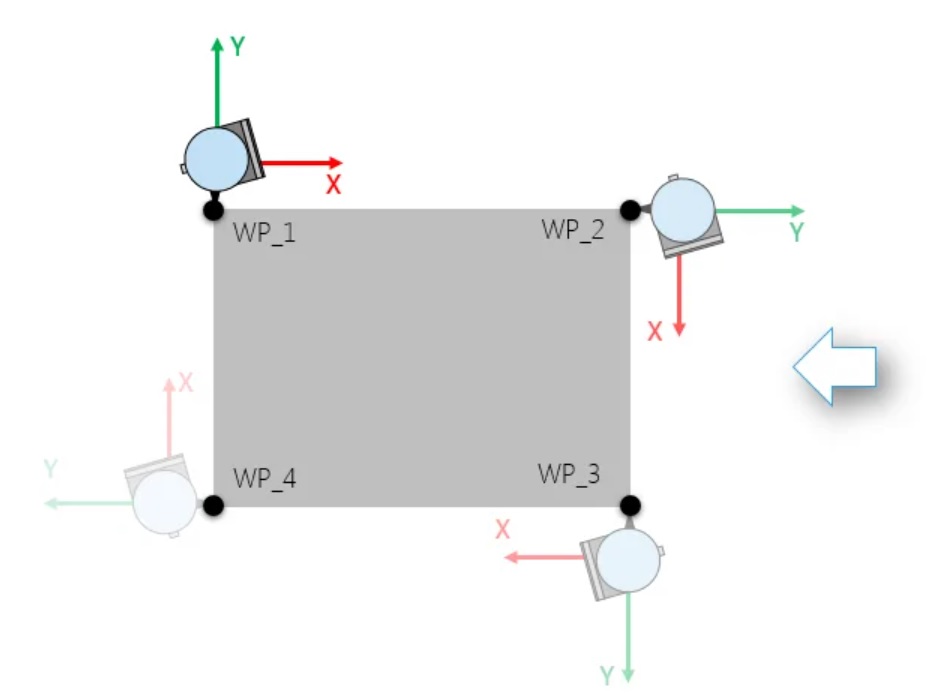
Rys. 7 Uproszczony schemat przedstawiający działanie trybu Ruch w trybie Siła
Aby uniknąć niepotrzebnych kolizji z cennymi niekiedy detalami, producent robotów współpracujących umożliwił przetestowanie trybu Siła przed uruchomieniem programu. Po wybraniu odpowiedniego typu, wartości składowych, układu współrzędnych i naciśnięciu przycisku Test na cobota będą działały siły, które zostały zdefiniowane przez użytkownika.
Każdy typ siły ma swoje zastosowanie i można je dowolnie dostosować do swoich potrzeb. Roboty współpracujące Universal Robots zapewniają elastyczność wdrożenia także w zaawansowanych szablonach takich jak Siła. Należy jednak pamiętać, że dokładność tego trybu w robotach Universal Robots e-Series jest znacznie większa niż w cobotach serii CB3.1.
Tę różnicę można zniwelować stosując zewnętrzne czujniki siły, takie jak HEX-E i HEX-H firmy OnRobot. Zapewniają one dokładność pomiaru siły rzędu nawet 0,2 N, co pozwala nawet cobotom nowej generacji na osiągnięcie wyższego poziomu precyzji. Firma OnRobot poprzez pełną kompatybilność czujników z robotami Universal Robots postarała się także o prostotę i funkcjonalność użytkowania. Czujniki te posiadają także dodatkowe funkcje, takie jak zapamiętywanie ścieżki, po jakiej ma poruszać się punkt TCP. O dostępność i cenę zapytaj na roboty@elmark.com.pl.

![]()
Cobot UR20 Universal Robots

Masz pytania? Potrzebujesz porady? Zadzwoń lub napisz do nas!




















