Praca ze stosem detali w cobotach Universal Robots

- Zakłady przemysłowe
Pobieranie oraz odkładanie na stos detali o nieregularnych grubościach wcale nie musi być trudne. W tym wpisie zapoznasz się z szablonem „Szukaj”, który przyspieszy i ułatwi ten proces.
Coboty Universal Robots cechują się łatwością programowania i wdrożenia. Podobne ruchy i działania można zaprogramować używając zupełnie różnych funkcji. Universal Robots w PolyScope przygotował szablony, które usprawniają tworzenie aplikacji, gdzie ręczne zaprogramowanie trwałoby dłużej i byłoby zdecydowanie trudniejsze. Jednym z takich szablonów jest Szukaj, który pozwala w prosty sposób skonfigurować zarówno pobieranie, jak i odkładanie na stos. Dzięki skorzystaniu z tej funkcji, robot sam wykryje wysokość stosu, weźmie pod uwagę zmienną wysokość elementów oraz optymalnie dostosuje ruchy.
Pobieranie ze stosu:
Zacznijmy od zapisania punktu orientacyjnego nad stosem. Robot przed każdym pobraniem, będzie podjeżdżał nad stos, aby mieć dogodną pozycję pobrania elementu. Następnym krokiem jest dodanie szablonu Szukaj i wybranie opcji Pobieranie ze stosu. W pierwszym oknie należy wypełnić warunek, który wskazuje na osiągnięcie następnego elementu stosu (w tym przypadku, gdy siła działająca na robota jest większa niż 3N). Kolejny parametr, wysokość stosu, jest bardzo ważny, bowiem determinuje, jak robot będzie podjeżdżał do następnego w stosie elementu.
Proces pobierania ze stosu dzielimy na dwie fazy:
- dojazd nad element szybkim ruchem przegubowym,
- szukanie - powolny ruch w kierunku szukania następnego elementu.
Robot w każdym kolejnym cyklu rozpoczyna proces szukania w miejscu wykrycia poprzedniego elementu, obniżonym o zdeklarowaną wysokość detalu. Jeżeli w polu wpiszemy faktyczną wysokość elementu, robot w następnym cyklu proces szukania zacznie w miejscu kolejnego elementu ze stosu. Biorąc pod uwagę, że elementy mogą mieć różną grubość, warto zadeklarować mniejszą wysokość detalu – robot rozpocznie wyszukiwanie nad kolejnym elementem stosu.
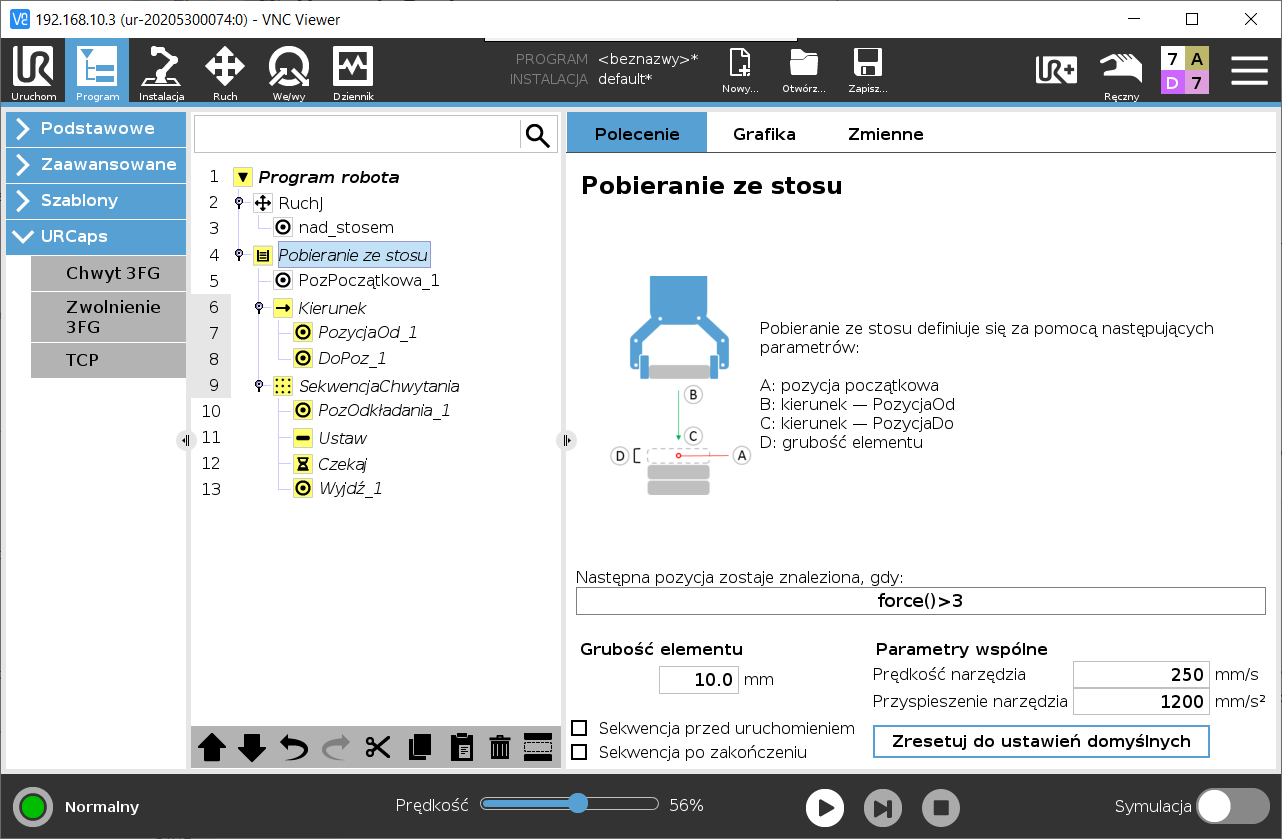
Rysunek nr 1. Okno szablonu Szukaj przy wybraniu opcji "Pobieranie ze stosu".
Następnym krokiem jest ustawienie pozycji:
- PozycjaPoczątkowa_1 – punkt nad maksymalnie wysokim stosem, z którego robot rozpocznie poszukiwanie
- PozycjaOd_1 – punkt, wraz z DoPoz_1 potrzebny do wskazania kierunku stosu. Wskazuje początek wektora kierunku. Warto ustawić go w tym samym miejscu co PozycjaPoczątkowa_1.
- DoPoz_1 – punkt, wskazujący na koniec wektora kierunku. Warto ustawić go w minimalnym położeniu stosu, poniżej ostatniego elementu, powyżej podłoża
Ustawienie punktów w powyższy sposób sprawia, że automatycznie wyliczana jest odległość „Zatrzymaj po”, po której robot przestanie realizować stos, tym samym nie uderzy chwytakiem w podłoże. Warunkiem zakończenia może być również dowolne wyrażenie „Zatrzymaj gdy”, w którego skład mogą wchodzić stany czujników bądź wyniki funkcji. W poniższym oknie mamy również możliwość ustawić prędkość oraz przyspieszenie ruchu wyszukiwania.
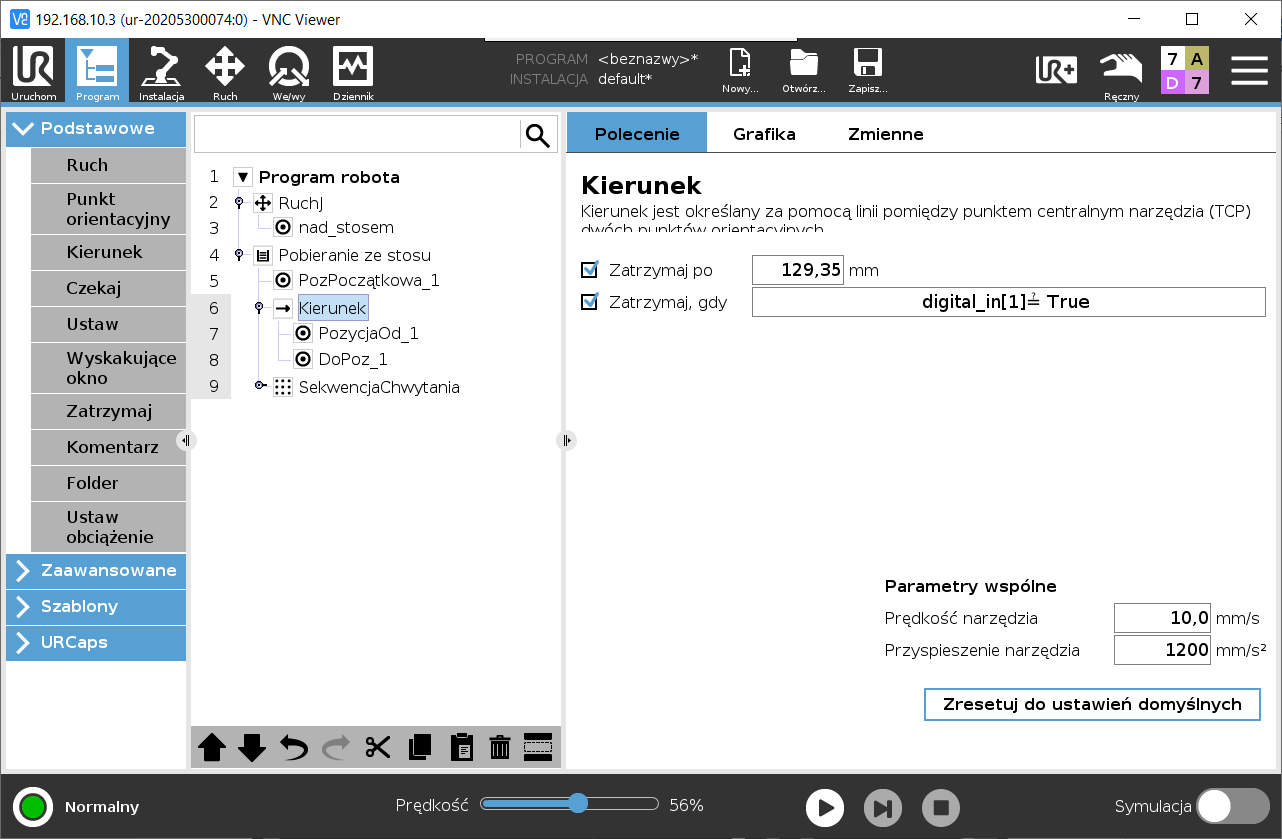
Rysunek nr 2 Poprawne ustawienie punktów orientacyjnych pozwala nam na automatyczne obliczenie odległości "Zatrzymaj po".
Rozwijając węzeł SekwencjaChwytania, mamy możliwość zaprogramować akcje, które zostaną wykonane po znalezieniu kolejnego elementu stosu. Wyznaczamy pozycję PozOdkładania_1 i względem niej programujemy ruchy, które mają się wykonać. Domyślnie za pomocą pozycji Wyjdź_1 ustalamy pozycję odjechania od chwyconego detalu, ale możemy wewnątrz sekwencji dodać więcej własnych punktów orientacyjnych. Należy pamiętać o dodaniu odpowiedniej akcji pochwycenia detalu. Poza szablonem można wreszcie dodać sekwencję służącą odkładaniu pobranych detali.
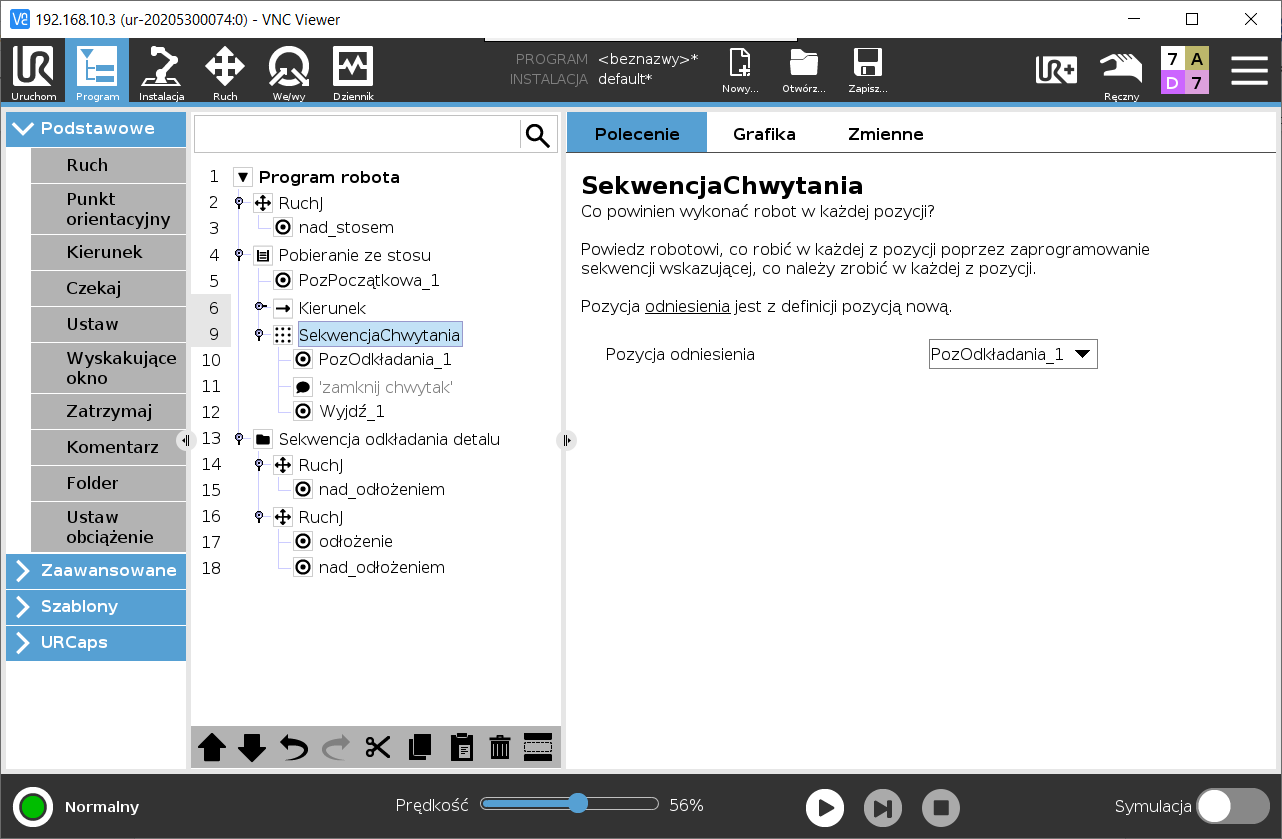
Rysunek nr 3. Tworzenie sekwencji chwytania
Odkładanie na stos
Analogicznie w cobotach Universal Robots zostało rozwiązane odkładanie na stos za pomocą szablonu. Różnica, w porównaniu do pobieraniu ze stosu, polega na zmianie punktów orientacyjnych. Aby robot zaczął szukanie nad detalem, należy w tym przypadku również podać większą niż rzeczywista wysokość detalu.
- PozPoczątkowa_1 – punkt, opisujący położenie elementu stosu, znajdującego się na samym dole
- PozycjaOd_1 – punkt wskazujący na początek wektora kierunku stosu, może być to PozPoczątkowa_1
- DoPoz_1 – punkt opisujący koniec wektora kierunku stosu, warto ustawić delikatnie powyżej ostatniego elementu stosu
Ustawienie punktów w powyższy sposób sprawia, że automatycznie wyliczana jest odległość, po której robot przestanie układać stos. Reszta ustawień jest analogiczna do pobierania ze stosu.
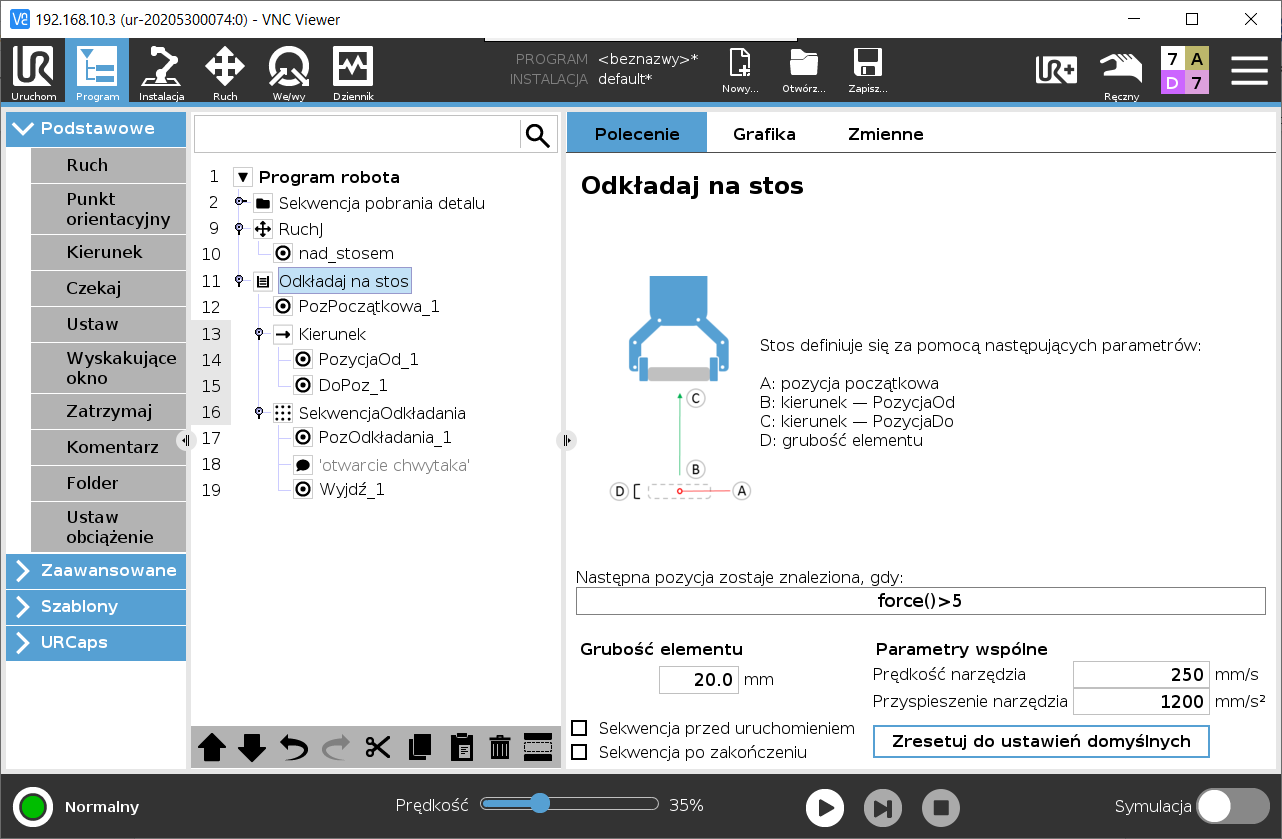
Rysunek nr 4. Okno odkładania na stos.
Podsumowanie
Szablonu szukaj w cobotach Universal Robots można użyć zarówno do układania oraz pobierania ze stosu elementów identycznych, lub o różnej grubości. Pozwala on na wykorzystanie różnego rodzaju czujników na wykrywanie kolejnych elementów. Zastosowanie szablonu, tworzy strukturę którą trzeba jedynie uzupełnić odpowiednimi pozycjami robota. W wielu przypadkach, pozwoli to znacznie zredukować czas pisania programu.
Jeżeli masz pytania do szablonu „Szukaj” lub chcesz zapytać się o roboty współpracujące Universal Robots, zapraszamy do kontaktu na roboty@elmark.com.pl.
Skontaktuj się ze specjalistą Elmark
Masz pytania? Potrzebujesz porady? Zadzwoń lub napisz do nas!


















