
Cobot UR20 Universal Robots
Cena od 220 500,00 zł netto
Przy złożeniu zamówienia do godziny 15:00 paczka zostanie wysłana jeszcze tego samego dnia W magazynie


Programowanie paletyzacji zajmuje Ci dużo czasu? Często zmienia się ułożenie palety bądź wymiary pudełek? Poznaj oprogramowanie, które pozwoli Ci w szybki i efektywny sposób wdrożyć paletyzację, omijając często występujące problemy.
Roboty UR w paletyzacji
Coboty Universal Robots wykorzystywane są w wielu aplikacjach. Z powodzeniem zastępują człowieka w żmudnych, powtarzalnych i męczących zadaniach. Najczęściej są to proste aplikacje Pick and Place, ale wysoko w tym rankingu postawiona jest również paletyzacja i depaletyzacja.
Do tego zadania wykorzystywane są najczęściej roboty:
Dzięki możliwości wyposażenia ich w dodatkowe osie (windy, podnośniki, suwnice), mogą z powodzeniem poradzić sobie z ustawianiem pudełek zarówno na europaletach, jak i paletach przemysłowych.
W standardowym oprogramowaniu robotów UR znajduje się szablon paletyzacji, który pozwala na zaprogramowanie paletyzacji jak i depaletyzacji, w kilkanaście minut. Jeżeli jest to prosty wzór, taki jak regularna siatka, wskazujemy, wodząc ramie robota, położenie 4 narożnych pudełek, ilość pudełek w kolumnie i rzędzie oraz ich wysokość. Należy jeszcze potem nauczyć cobota, w jaki sposób ma podjeżdżać i odjeżdżać od odkładanych paczek.
Problemy paletyzacji
Często bywa jednak, że ułożenie paczek na palecie jest nieregularne. W takim przypadku musimy nauczyć położenia każdej nieregularnej paczki z osobna. Liczbę tą zazwyczaj trzeba podwoić, bo zazwyczaj chcemy, aby ułożenie parzystych i nieparzystych warstw się różniło. Nie ma to większego znaczenia, jeżeli robot pracuje z takim samym ustawieniem przez większość czasu swojej pracy. Zaczyna to być zauważalnym problem, jeżeli w zakładzie często zmienia się format paletyzacji (różne wymiary paczek, różne wymiary palet, zmiana miejsca pracy cobota). Jeżeli tworzymy szablon paletyzacji, musimy go następnie przetestować: czy układanie paczek działa poprawnie, czy robot dosięga do każdego miejsca, czy ruchy są bezpieczne. W przypadku podstawowego konfiguratora, wszystkie te kroki trzeba sprawdzać podczas wykonania programu z małymi prędkościami.
Rozwiązanie Native Robotics
Większość z tych problemów rozwiązuje narzędzie z firmy Native Robotics. W skład zestawu wchodzi komputer dokonujący na bieżąco obliczeń dotyczących paletyzacji oraz dedykowane, proste oprogramowanie. Pomoże ono zaprogramować paletyzację nawet osobom, które nie miały wcześniej styczności z procesem paletyzacji.
W celu korzystania z narzędzia, niezbędne będzie podłączenie jeszcze monitora lub ekranu dotykowego, na którym będziemy mieli podgląd parametrów i ustawień paletyzacji. Połączenie rozwiązania Native Robotics z robotem realizujemy poprzez kabel ethernetowy.
Jak to wszystko działa?
Użytkownik po uruchomieniu programu ma dwie opcje: wybiera wcześniej zdefiniowany szablon paletyzacji, lub tworzy go od początku. Przejdźmy przez kolejne kroki tworzenia nowego układu, tak jakbyśmy pierwszy raz używali urządzenia.
Na początku należy ustawić wymiary i wagę paczki. Następnym krokiem jest wybór palety. Możemy skorzystać z predefiniowanych typów, lub stworzyć i zapisać paletę o niestandardowych wymiarach.
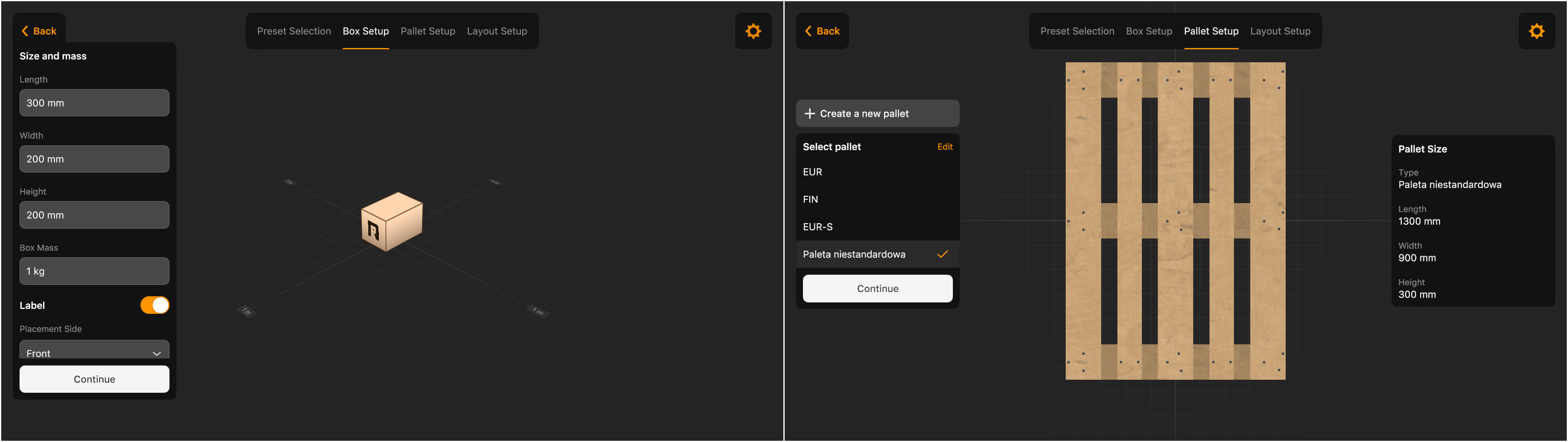 Rysunek 1. Ustawienia wymiarów paczek i wybór palety
Rysunek 1. Ustawienia wymiarów paczek i wybór palety
Kolejnym krokiem jest wybór ustawienia pudełek na palecie. Możemy skorzystać z opcji „Magic Pack”, aby program automatycznie znalazł optymalne ustawienie. Opcjonalnie możemy ustawić pudełka za pomocą myszki, lub dotykowego ekranu. Paczki są inteligentnie „przyciągane” do krawędzi, więc nie należy obawiać się o potrzebę precyzji.
Po zdefiniowaniu pojedynczej warstwy, mamy możliwość wyboru liczby warstw, jak kolejne warstwy mają być układane, oraz czy pomiędzy nimi ma znajdować się przekładka. Paletę ze zdefiniowanym ułożeniem, możemy zapisać pod wybraną przez nas nazwą. Pozwoli to wybrać ją na początku programu, dzięki czemu nie będziemy musieli tworzyć układu od nowa.
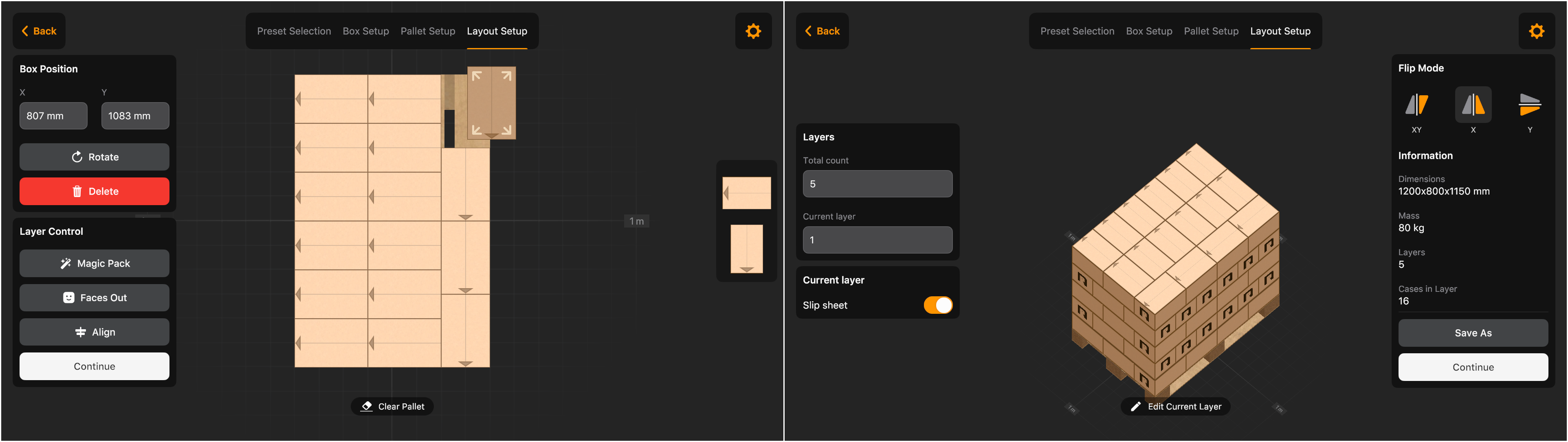
Rysunek 2. Dostosowywanie układu pojedynczej warstwy i rozkładu warstw na palecie
Mając ustawione te opcje, możemy wskazać, w którym miejscu pobierane są paczki, gdzie znajdują się palety, oraz podajnik na przekładki (jeżeli je wykorzystujemy). Wszystkie te punkty definiujemy poprzez przesunięcie końcówki roboczej w docelowe miejsce. Konieczne będzie również dodanie parametrów chwytaka, z którego korzysta robot (punkt centralny, waga, środek ciężkości).
Należy zwrócić uwagę, że są to opcje ustawiane jednorazowo. Jeżeli w procesie zmieniają się wymiary paczek bądź palet, nie trzeba będzie już zmieniać tych opcji – program sam wszystko automatycznie dopasuje.
Wykonując powyższe akcje, przygotowaliśmy program do pierwszego uruchomienia. Już w tym momencie możemy sprawdzić symulację, czy uda się ułożyć wszystkie paczki i ile będzie trwała paletyzacja.
Rysunek 3. Parametry aktualnie wykonywanej paletyzacji. Zielonym kolorem zaznaczone są pudełka, które ramię robota może odłożyć
Po przeprowadzeniu symulacji, można połączyć się z fizycznym robotem. Aby to zrobić, rozwiązanie Native Robotics oraz kontroler robota muszą znajdować się w tej samej sieci. W ustawieniach programu wybieramy adres IP robota, a po kliknięciu w odpowiedni przycisk, robot zacznie wykonywać zadanie.
Dodatkowe funkcje
Oprogramowanie posiada również kilka ciekawych, dodatkowych opcji.
Cały czas śledzona jest układana paczka. Jeżeli przy przenoszeniu paczki z przenośnika na paletę wystąpi zatrzymanie ochronne, spowodowane np. kontaktem z osobą, program spyta się, czy ma kontynuować, przejść do następnej paczki czy zakończyć proces.
Ciekawym dodatkiem jest również dodanie inteligentnego wyznaczania trajektorii. Program wiedząc, w którym miejscu znajdują się paczki, może poprowadzić ramię robota w taki sposób, aby ruch był optymalny. Pozwala to, względem typowej trajektorii, znacznie zmniejszyć czas cyklu. Kolejną zaletą wspomnianej opcji jest to, że optymalna trajektoria przekłada się na mniejsze zużycie przegubów robota – ruchy są wtedy dużo płynniejsze, robot nie musi tak często hamować i przyspieszać.
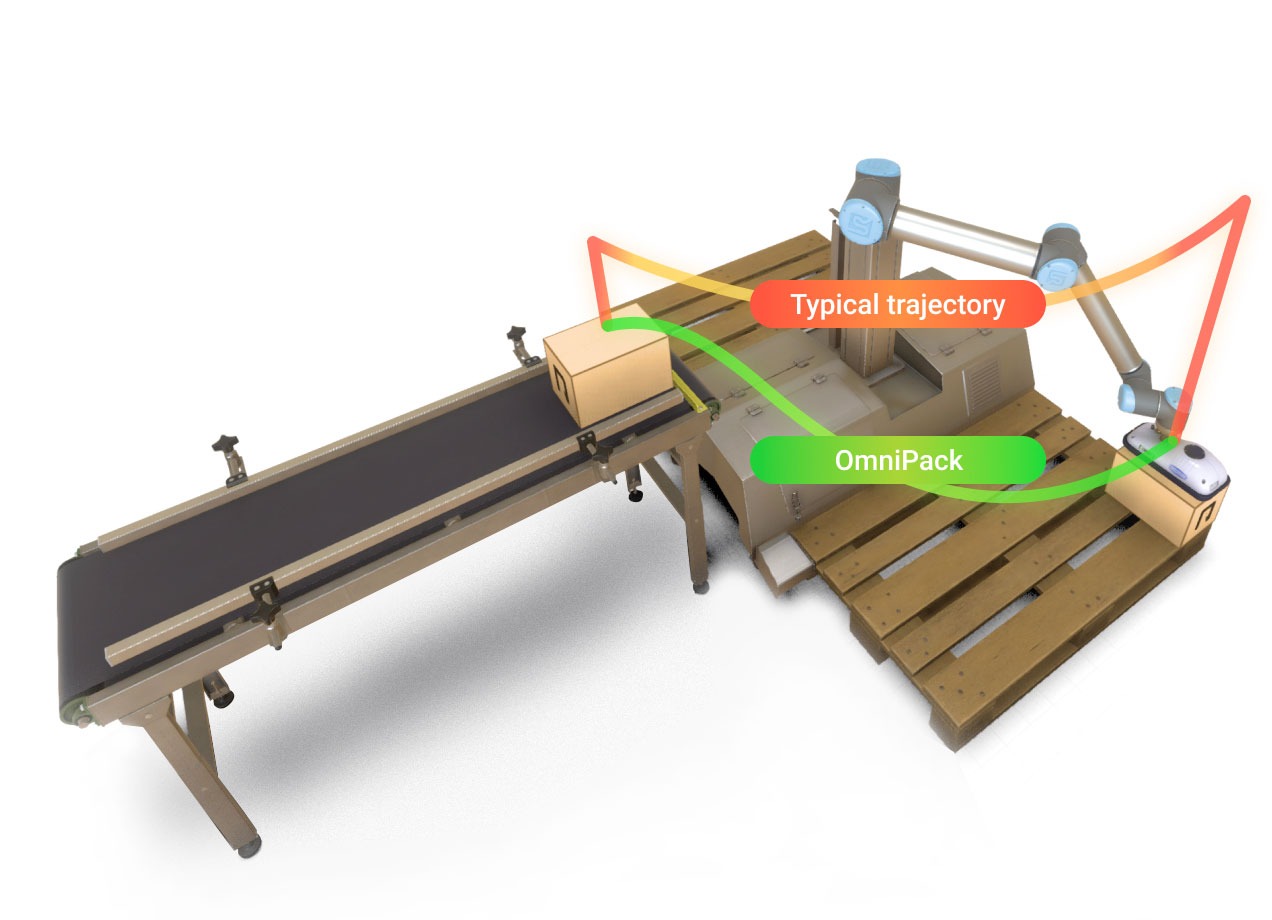
Rysunek 4. Porównanie typowej i wygenerowanej przez rozwiązanie Native Robotics trajektorii (źródło: https://native-robotics.com/omnipack)
Podsumowanie
Coboty UR, szczególnie UR10e i UR16e, świetnie nadają się do paletyzacji. Dostępny po wyjęciu z pudełka, wbudowany w oprogramowanie kreator szablonu paletyzacji, sprawdzi się doskonale w większości zadań. W prosty sposób pozwala zaprogramować większość formatów. W przypadku bardziej skomplikowanych ustawień, trzeba będzie poświęcić więcej czasu na konfigurację warstw. Jeżeli w Twoim zakładzie często zmieniają się rozmiary pudełek, korzystasz z różnych rodzajów palet, doskonałym pomocnikiem może okazać się rozwiązanie od Native Robotics. Po ustawieniu podstawowych parametrów, przezbrojenie robota na inny układ/wymiar paczek to kwestia kilku minut. Oprogramowanie jest proste i intuicyjne, więc bez pisania linijki kodu, możesz stworzyć szybką, bezpieczną i efektywną paletyzację, zmniejszając czas cyklu oraz redukując zużycie robota.
Jeżeli interesuje Cię proces paletyzacji, zapraszamy do obejrzenia Magazynu Robotów, gdzie w jednym z odcinków poruszyliśmy temat paletyzacji.
![]()
Cobot UR20 Universal Robots





Masz pytania? Potrzebujesz porady? Zadzwoń lub napisz do nas!


















