1. Na serwosterowniku wyświetla się na zmianę POT, NOT.
|
|
Nastąpiła blokada ruchu w przód i w tył, aby odblokować ruch przejdź do parametru Pn000 i ustaw wartość 0110.
|
2. Nie mogę przejść do ustawień parametrów (menu Pn) w serwosterowniku.
|
|
Standardowo po uruchomieniu serwosterownika menu Pn jest ukryte. W celu odblokowania należy przejść do Fn007, nacisnąć ENTER i sekwencję INC, DEC, DEC, INC i powróć do funkcji użytkowych ponownie naciskając ENTER. Teraz przeglądając tryby przyciskiem MODE będzie widoczne menu Pn.
|
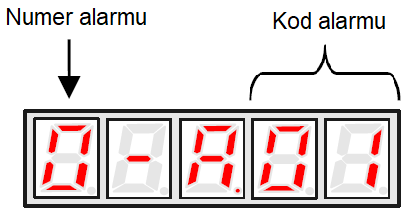
3. Po uruchomieniu pojawia się błąd A47.
|
|
Błąd A47 pojawia się przy pierwszym uruchomieniu serwonapędu z enkoderem absolutnym i informuje o braku danych dotyczących aktualnej pozycji wału silnika. Należy zresetować dane enkodera za pomocą Fn010 i Fn011. Należy przejść najpierw do Fn010, po wejściu w parametr pojawi się na wyświetlaczu c-Pos. Przytrzymujemy na moment przycisk MODE do pojawienia się clr--. To samo działanie wykonamy w Fn011 tylko resetowanie wykonujemy gdy na ekranie pojawi się c-Err.
Jeśli mimo zresetowania parametrów nadal pojawia się błąd A47, oznacza to że bateria enkodera absolutnego jest rozładowana i wymaga wymiany.
|
4. Jak zresetować błąd?
|
|
Należy nacisnąć ENTER na panelu serwosterownika, gdy wyświetla się kod błędu.
|
5. Nie mogę nawiązać komunikacji przez CANopen.
|
|
Ustawienia CANopen znajdują się w parametrach Pn006 i Pn704. Pn006 odpowiada za wybór protokołu komunikacji. Dla CANopen należy wpisać 3 w Pn006.0. Natomiast w Pn704.0 przechowywane jest ID urządzenia z którym się łączymy.
|
6. Wyświetla się błąd A66.
|
|
Błąd A66 wynika z zakłóceń w komunikacji CANopen. Jeśli poprawnie skonfigurowano połączenie, to trzeba umieścić w wolnym gnieździe CANbus rezystor terminujący 120Ω.
|
7. Serwonapęd przestał działać i pojawił się błąd A15.
|
|
Jeśli używany był serwonapęd o zasilaniu 230V to prawdopodobnie nie został podłączony rezystor regeneracyjny. Dla serwosterowników UMD-000B ~ 0004B należy dołączy rezystor 60W, 50Ω. W przypadku serwonapędów 400V rezystor jest wbudowany i mogło nastąpić jego uszkodzenie.
|
8. Czy można sterować serwonapędem bez sterownika PLC?
|
Tak, możemy sterować za pomocą sygnałów wejść/wyjść w serwosterowniku, ale możliwości sterowania są znacznie ograniczone niż w przypadku użycia sterownika PLC.
|
9. Jak wykonać ręczny ruch serwosilnika?
|
|
Za pomocą parametru Fn002 w serwosterowniku. Po wejściu w parametr pojawi się napis JOG. Za pomocą MODE włączamy/wyłączamy serwosilnik, a INC/DEC wykonujemy ruchu do przodu/tyłu.
|
10. Czy mogę użyć serwosterownika 400W do zasilania serwosilnika 100W?
|
|
Nie, serwosilnik i serwosterownik musi być takiej samej mocy.
|
11. Czy mogę używać enkodera absolutnego jako inkrementalny?
|
|
Tak, należy ustawić parametr Pn002.2 na 1.
|
12. Czy mogę używać serwonapędów Unitronics z starszymi sterownikami?
|
|
Tak, oprócz sterowników serii UniStream serwonapędy działają jeszcze z serią Vision.
|
13. Czy mogę użyć serwosilnika z hamulcem do zatrzymywania ruchu?
|
|
Nie, hamulec w serwosilniku odpowiada tylko za unieruchomienie wału silnika, gdy ten jest zatrzymany, użycie do zatrzymania rozpędzonego wału może spowodować uszkodzenie silnika.
|
14. Nie wiem jaki serwonapęd wybrać do mojej aplikacji.
|
|
Pomocny w doborze serwonapędu będzie artykuł: "Jak dobrać serwonapęd i sterowanie do aplikacji", lub proszę wysłać zapytanie na sterowniki@elmark.com.pl.
|
15. Do czego służy rezystor regeneracyjny i czy jest mi potrzebny?
|
|
Rezystor regeneracyjny rozprasza energię, która tworzy się podczas ruchu serwosilnika (szczególnie podczas gwałtownego hamowania i przyśpieszeń). Brak rezystora może doprowadzić do spalenia układu. W serwosterownikach UMD-0000B~0004B należy dołączyć zewnętrzny opornik regeneracyjny (60 W, 50 Ω), w pozostałych jest on wbudowany.
|
16. Podczas działania serwonapędu występują duże wibracje.
|
|
Wibracje czy wydawanie dźwięków przez serwonapęd może być spowodowane nieprawidłowym nastrojeniem. W tym celu należy przeprowadzić diagnostykę układu ruchu za pomocą UniLogic lub ręcznie. Więcej szczegółów można znaleźć w instrukcji „Diagnostyka serwonapędów Unitronics”
|
17. Co potrzebuję do połączenia serwonapędu do sterownika PLC?
|
|
W zależności od rodzaju serwosterownika będzie potrzebny moduł komunikacyjny CANbus lub EtherCAT.
|
18. Czy mogę podłączyć serwosilnik innego producenta do serwosterownika Unitronics?
|
|
Nie.
|
19. Czym różni się enkoder inkrementalny od absolutnego?
|
|
Enkoder absolutny zachowuje bezwzględną pozycję serwonapędu, dzięki czemu zna pozycję po odłączeniu zasilania. Enkoder inkrementalny przechowuje pozycję względem pozycji bazowej. W serwonapędach Unitronics enkodery absolutne są rozdzielczości 23 bitów, a inkrementalne 20 bitów.
|
20. Ile osi ruchu może obsłużyć sterownik PLC?
|
|
Sterownik PLC może obsłużyć maksymalnie do 8 osi.
|
21. Czy serwonapędy Unitronics obsługują interpolację?
|
|
Jeszcze nie, ale trwają pracę nad obsługą interpolacji.
|
22. Czy jest możliwa synchronizacja osi serwonapędu?
|
|
Tak
|
23. Kiedy powinienem używać serwonapędu z CANopen a kiedy z EtherCATem?
|
|
Gdy mamy większą ilość osi (>4) i wymagamy szybkiej (<5 ms) i precyzyjnej reakcji serwonapędu zdecydowanie powinniśmy wybrać EtherCAT. Przy prostych aplikacjach gdzie może występować wolniejszy czas reakcji to możemy zastosować CANopen.
|
24. Czy dostępny jest jakiś kurs odnośnie serwonapędów Unitronics?
|
|
Tak, aktualnie prowadzimy Akademię Serwonapędów (LINK). Zapisując się w formularzu otrzymają Państwo mailowo dostęp do instrukcji i materiałów szkoleniowych.
25. Jak sprawdzić historię alarmów?
Na panelu serwosterownika możemy zobaczyć do 10 alarmów, które pojawiły w trakcie pracy serwonapędu.
- Za pomocą przycisku MODE przejdź do trybu funkcji użytkowych,
- Wybierz Fn000 i potwierdź ENTER,
- Pojawi się historia alarmów, za pomocą INC, DEC można przeglądać alarmy.
- Zapisane alarmy można usunąć przytrzymując ENTER do momentu pojawienia się Fn000.

26. Czy mogę sprawdzić moment bezwładności układu?
Tak, jeśli mamy już serwonapęd w docelowej aplikacji pomiar wykonujemy za pomocą parametru Fn009. Po naciśnięciu ENTER serwonapęd wykona 6 obrotów i poda wartość na wyświetlaczu w kgcm2. Ta wartość może nam pomóc w określeniu wzmocnienia, więcej w artykule "Regulacja serwonapędów Unitronics - wzmocnienie i sztywność układu".
|