
Jak sama nazwa wskazuje, roboty współpracujące Universal Robots stworzone zostały do interakcji z człowiekiem. Dzięki zastosowaniu certyfikowanych funkcji bezpieczeństwa, aplikacje z cobotami mogą działać bez klatek bezpieczeństwa. Jedną z odpowiedzialnych za to funkcji jest płaszczyzna bezpieczeństwa, która zostanie omówiona w poniższym artykule.
Co to jest płaszczyzna bezpieczeństwa
Płaszczyzna bezpieczeństwa to wirtualna ściana, której robot nie może przekroczyć, bądź po której przekroczeniu przechodzi w tryb zredukowany. Pomaga ona chronić sprzęt oraz przede wszystkim osoby poruszające się w bezpośrednim otoczeniu robota. Można stworzyć do 8 płaszczyzn, które działając, ograniczają ruchy robota do „wirtualnej klatki”.
Tworzenie układów
Płaszczyzny bezpieczeństwa można ustawić na kilka sposobów. Aby zastosować taką funkcję, musimy najpierw utworzyć układ, który będzie wykorzystywany do skonfigurowania wirtualnej ściany bezpieczeństwa. Można wykorzystać w tym celu:
- Punkt
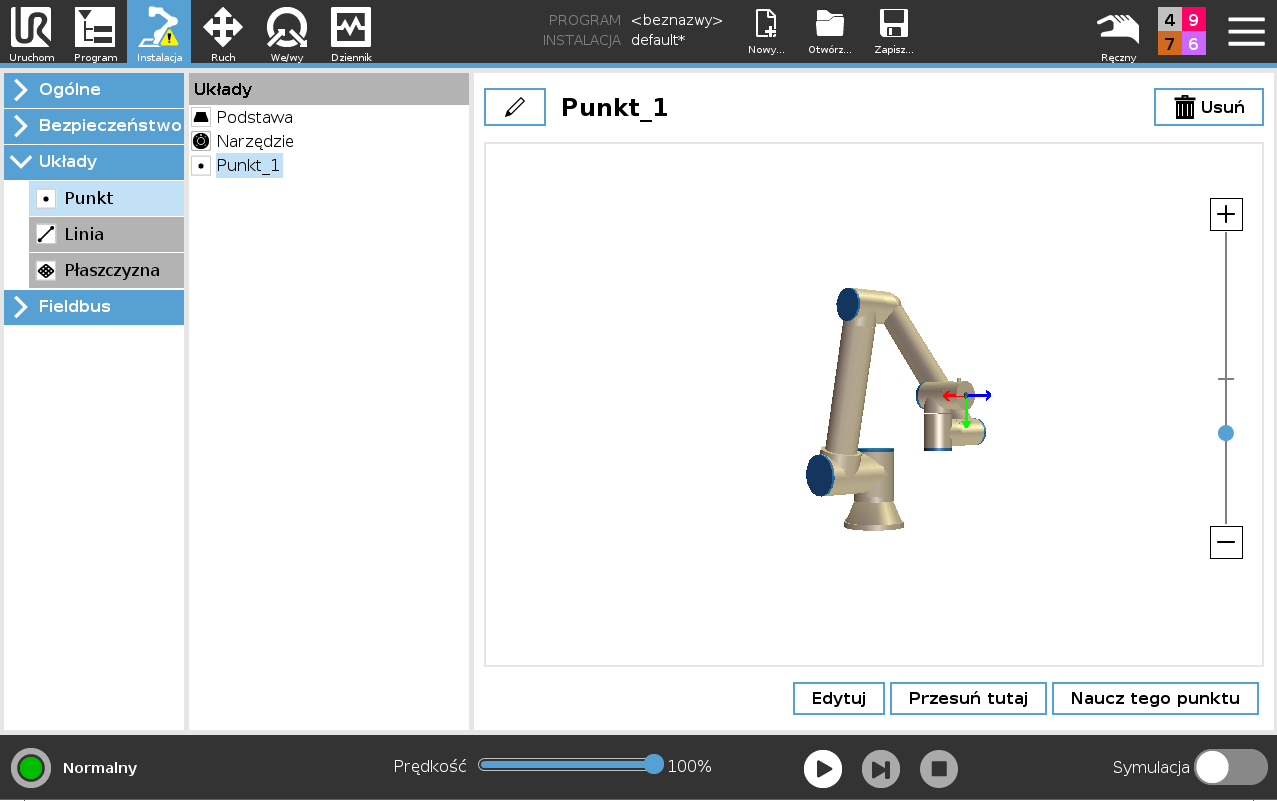
Przechodzimy do zakładki Instalacja -> Układy. Z listy wybieramy punkt. Kolejnym krokiem będzie wybranie opcji naucz tego punktu.
 Rysunek 1. Tworzenie nowego układu
Rysunek 1. Tworzenie nowego układu
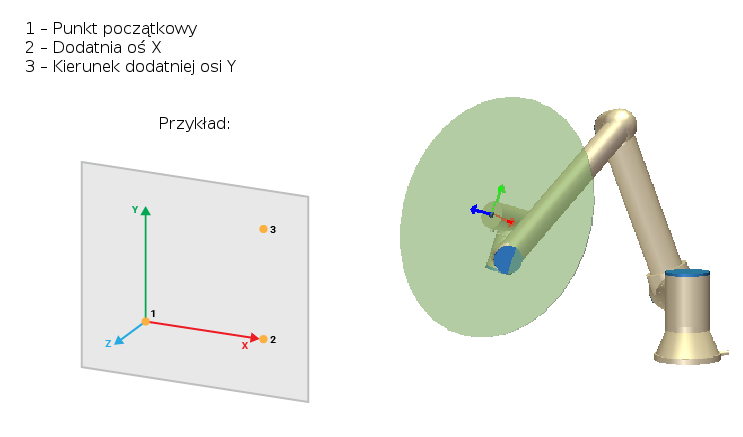
W następnym oknie ustawiamy ramię robota tak, aby osie X i Y układu aktualnie używanego narzędzia, tworzyły płaszczyznę, którą będziemy mogli potem wykorzystać. Należy pamiętać, że orientacja narzędzia (dodatni zwrot osi Z układu narzędzia) musi wskazywać na strefę, w której robot nie będzie mógł się poruszać/będzie pracował w trybie zredukowanym.
 Rysunek 2. Na osi X (czerwona) i Y (zielona) tworzona jest płaszczyzna. Oś Z (niebieska) wskazuje kierunek strefy "zakazanej"
Rysunek 2. Na osi X (czerwona) i Y (zielona) tworzona jest płaszczyzna. Oś Z (niebieska) wskazuje kierunek strefy "zakazanej"
- Płaszczyzna
Kiedy wiemy, że nasza płaszczyzna będzie miała niestandardową orientację w przestrzeni, możemy skorzystać z układu „płaszczyzna”. Analogicznie do poprzedniego przykładu, przechodzimy do kreatora płaszczyzn. Proces polega na wskazaniu trzech punktów za pomocą TCP. Na ich podstawie tworzony jest nowy układ, który wykorzystamy przy konfiguracji ściany bezpieczeństwa.
 Rysunek 3. Wskazanie 3 punktów pozwala nam na stworzenie płaszczyzny wyznaczonej na osiach X i Y
Rysunek 3. Wskazanie 3 punktów pozwala nam na stworzenie płaszczyzny wyznaczonej na osiach X i Y
Tworzenie płaszczyzn bezpieczeństwa
Po stworzeniu interesujących nas układów, możemy przejść do zakładki Instalacja -> Bezpieczeństwo -> Płaszczyzny. Aby dodawać, usuwać bądź modyfikować ściany bezpieczeństwa, musimy wpisać hasło bezpieczeństwa i kliknąć odblokuj. 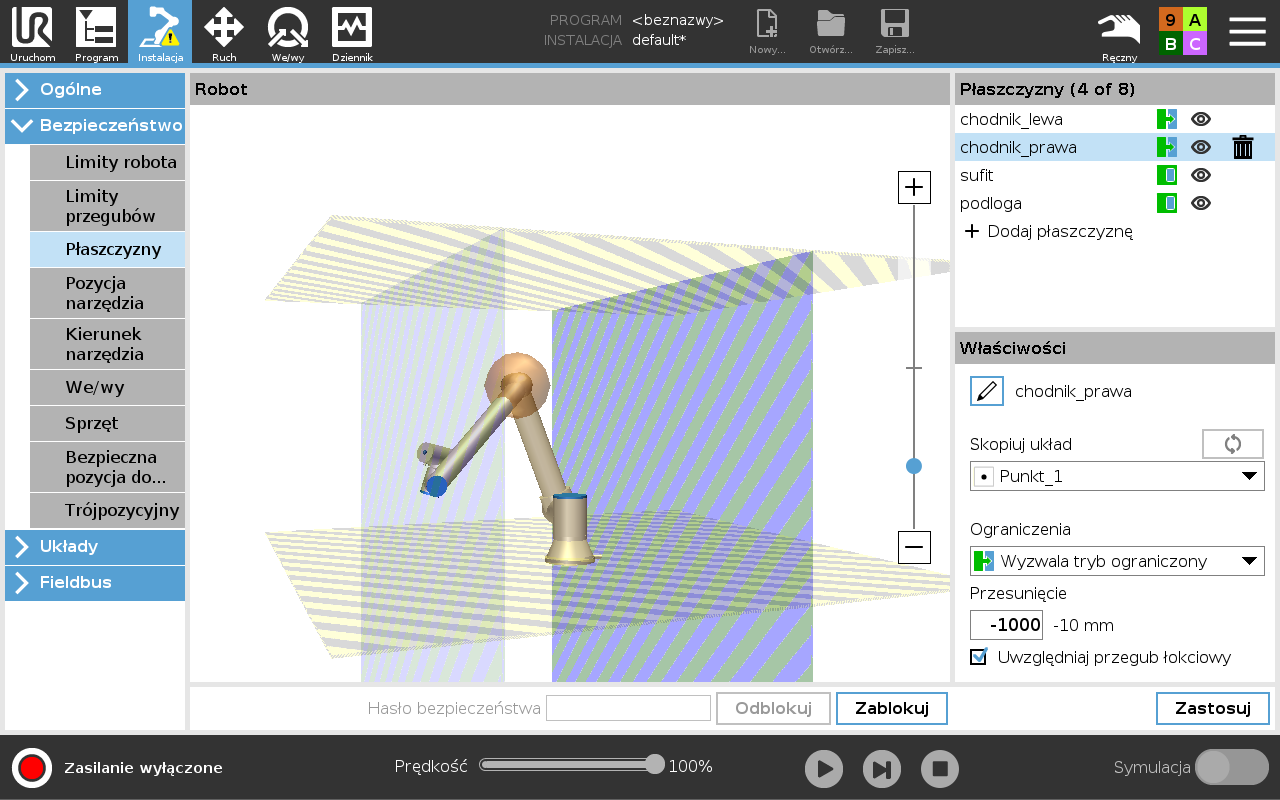 Rysunek 4. Przykładowa implementacja płaszczyzn bezpieczeństwa
Rysunek 4. Przykładowa implementacja płaszczyzn bezpieczeństwa
W polu płaszczyzny wybieramy opcję dodaj płaszczyznę. W tym samym czasie, możemy korzystać maksymalnie z 8 ścian bezpieczeństwa.
W polu właściwości możemy zmienić nazwę naszej płaszczyzny. Z listy skopiuj układ wybieramy interesujący nas układ (punkt lub płaszczyzna), na podstawie którego będzie utworzona płaszczyzna bezpieczeństwa. W polu ograniczenia wybieramy tryb, w jakim ma ona pracować. Do wyboru są tryby:
- Normalny: gdy system bezpieczeństwa działa w trybie normalnym, zdefiniowane części robota nie mogą przekroczyć płaszczyzny bezpieczeństwa.
- Ograniczony: gdy system bezpieczeństwa działa w trybie ograniczonym, zdefiniowane części robota nie mogą przekroczyć płaszczyzny bezpieczeństwa.
- Oba: gdy system bezpieczeństwa działa w trybie normalnym lub ograniczonym, zdefiniowane części robota nie mogą przekroczyć płaszczyzny bezpieczeństwa.
- Wyzwala tryb ograniczony: przekroczenie płaszczyzny zdefiniowanymi częściami robota powoduje wyzwolenie trybu zredukowanego.
- Wyłączony: wyłącza z użytku wybraną płaszczyznę.
Domyślnie robot nie może przekroczyć płaszczyzny bezpieczeństwa jedynie punktem początkowym układu narzędzia (X = 0, Y = 0, Z = 0 układu współrzędnych narzędzia). Aby to zmienić, należy w ustawieniach pozycji narzędzia (Instalacja -> Bezpieczeństwo -> Pozycja narzędzia), dodać informację o zastosowanym przez nas narzędziu.
Przy pomocy opcji przesunięcie, możemy przesunąć nasz układ o wpisaną w milimetrach wartość.
Ostatnią do wyboru funkcją jest uwzględnienie przegubu łokciowego. Zaznaczenie jej powoduje, że powyższe ustawienia będą zastosowane również przy przekraczaniu granicy przez łokieć robota. Po ustawieniu wszystkich opcji, możemy zakończyć proces, klikając zastosuj w prawym dolnym rogu ekranu.
Tworzenie płaszczyzn bezpieczeństwa w cobotach Universal Robots jest bardzo proste. Zastosowanie tej funkcji pomoże chronić zarówno ludzi pracujących w bezpośrednim otoczeniu, jak i sprzęt znajdujący się w pobliżu robota. Jeżeli masz problem z ustawieniami bezpieczeństwa lub masz pytania dotyczące robotów Universal Robots, zapraszamy do kontaktu na adres roboty@elmark.com.pl.
![]()


















